 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCupSoccer Review: The Goalkeeper, a Distinctive Player
Mar 22, 2023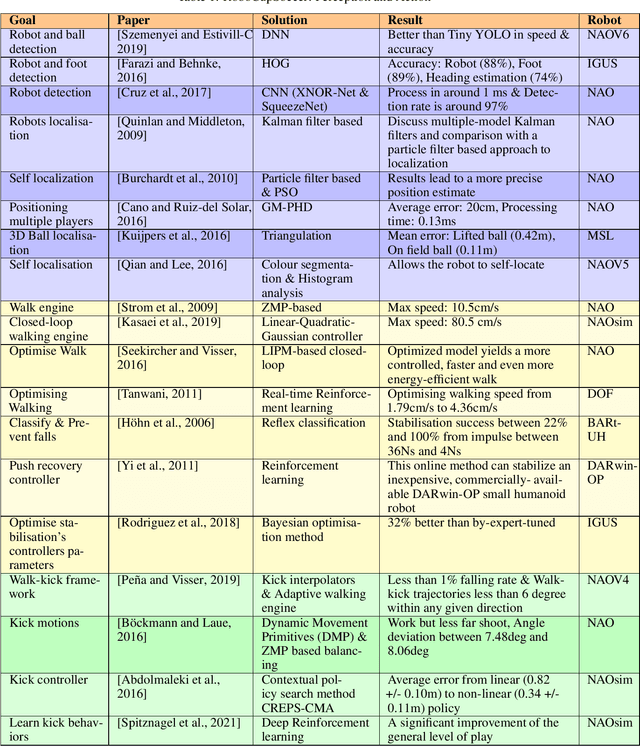
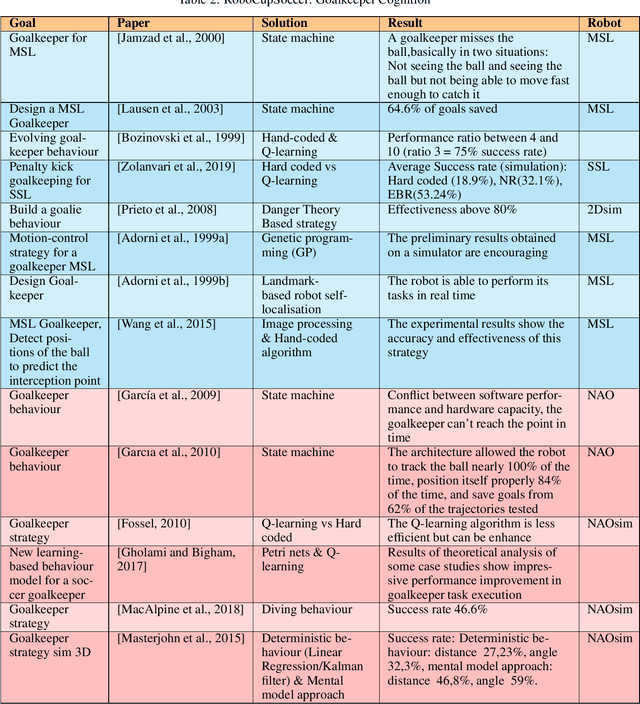
This article offers a literature review of goalkeeper robots in the context of the RoboCupSoccer competition. The latter is one of the various league categories hosted by the RoboCup Federation, which fosters AI and Robotics with their landmark challenges. Despite the number of articles on the subject of the goalkeeper, there is a lack of studies offering a comprehensive and up-to-date analysis. We propose to provide a review of research related to goalkeepers within the RoboCupSoccer leagues in order to extract possible improvements and scientific issues. The goalkeeper, although being a specific player, has many skills in common with other players. Therefore, this review is divided into three parts: perception, cognition and action, where the perception and action parts are common to all players and the cognition part focuses on goalkeepers. The discussion will open up on the possible improvements of the developments made for these goalkeepers.
Interactive Machine Learning: A State of the Art Review
Jul 13, 2022
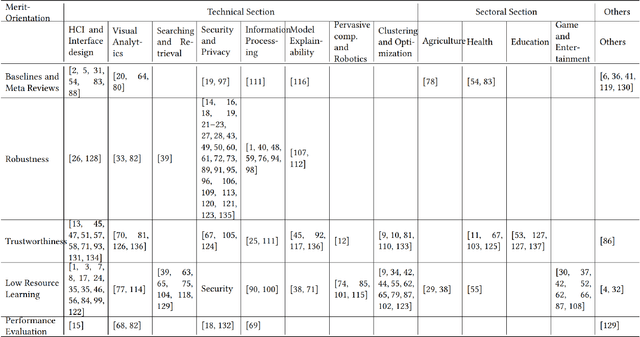
Machine learning has proved useful in many software disciplines, including computer vision, speech and audio processing, natural language processing, robotics and some other fields. However, its applicability has been significantly hampered due its black-box nature and significant resource consumption. Performance is achieved at the expense of enormous computational resource and usually compromising the robustness and trustworthiness of the model. Recent researches have been identifying a lack of interactivity as the prime source of these machine learning problems. Consequently, interactive machine learning (iML) has acquired increased attention of researchers on account of its human-in-the-loop modality and relatively efficient resource utilization. Thereby, a state-of-the-art review of interactive machine learning plays a vital role in easing the effort toward building human-centred models. In this paper, we provide a comprehensive analysis of the state-of-the-art of iML. We analyze salient research works using merit-oriented and application/task oriented mixed taxonomy. We use a bottom-up clustering approach to generate a taxonomy of iML research works. Research works on adversarial black-box attacks and corresponding iML based defense system, exploratory machine learning, resource constrained learning, and iML performance evaluation are analyzed under their corresponding theme in our merit-oriented taxonomy. We have further classified these research works into technical and sectoral categories. Finally, research opportunities that we believe are inspiring for future work in iML are discussed thoroughly.
Let's be friends! A rapport-building 3D embodied conversational agent for the Human Support Robot
Mar 08, 2021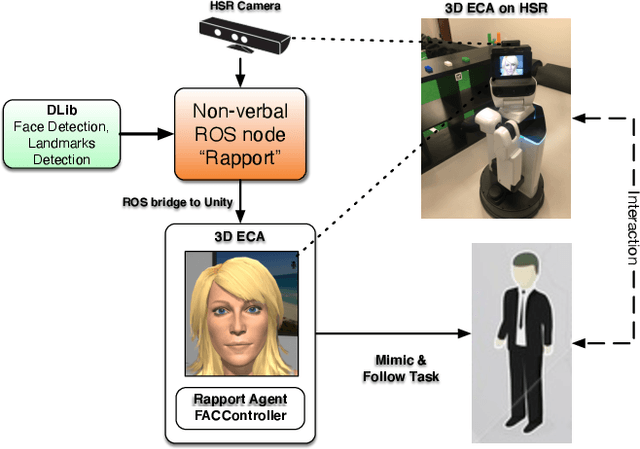
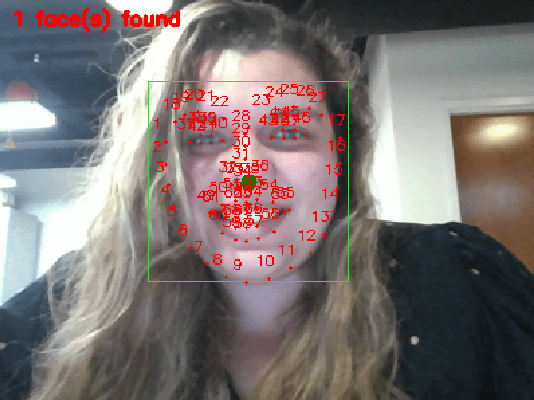
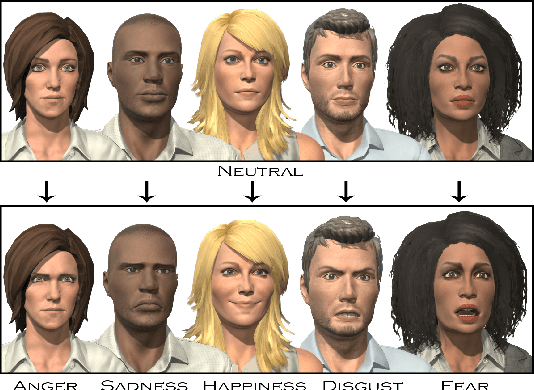
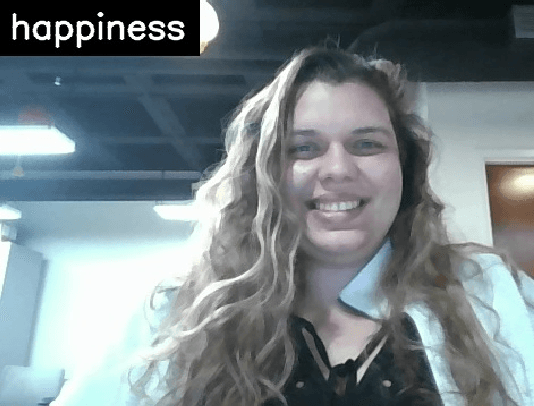
Partial subtle mirroring of nonverbal behaviors during conversations (also known as mimicking or parallel empathy), is essential for rapport building, which in turn is essential for optimal human-human communication outcomes. Mirroring has been studied in interactions between robots and humans, and in interactions between Embodied Conversational Agents (ECAs) and humans. However, very few studies examine interactions between humans and ECAs that are integrated with robots, and none of them examine the effect of mirroring nonverbal behaviors in such interactions. Our research question is whether integrating an ECA able to mirror its interlocutor's facial expressions and head movements (continuously or intermittently) with a human-service robot will improve the user's experience with the support robot that is able to perform useful mobile manipulative tasks (e.g. at home). Our contribution is the complex integration of an expressive ECA, able to track its interlocutor's face, and to mirror his/her facial expressions and head movements in real time, integrated with a human support robot such that the robot and the agent are fully aware of each others', and of the users', nonverbals cues. We also describe a pilot study we conducted towards answering our research question, which shows promising results for our forthcoming larger user study.
Converting Instance Checking to Subsumption: A Rethink for Object Queries over Practical Ontologies
Feb 26, 2015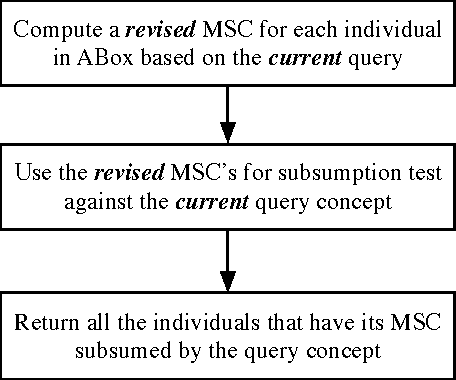
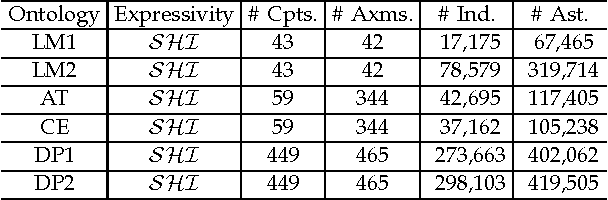
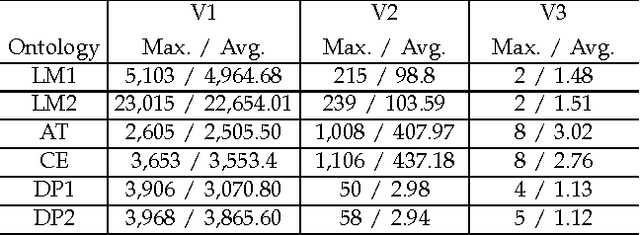
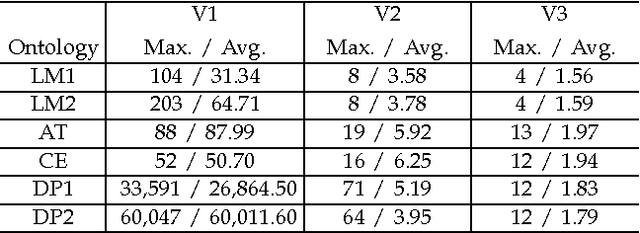
Efficiently querying Description Logic (DL) ontologies is becoming a vital task in various data-intensive DL applications. Considered as a basic service for answering object queries over DL ontologies, instance checking can be realized by using the most specific concept (MSC) method, which converts instance checking into subsumption problems. This method, however, loses its simplicity and efficiency when applied to large and complex ontologies, as it tends to generate very large MSC's that could lead to intractable reasoning. In this paper, we propose a revision to this MSC method for DL SHI, allowing it to generate much simpler and smaller concepts that are specific-enough to answer a given query. With independence between computed MSC's, scalability for query answering can also be achieved by distributing and parallelizing the computations. An empirical evaluation shows the efficacy of our revised MSC method and the significant efficiency achieved when using it for answering object queries.
Extract ABox Modules for Efficient Ontology Querying
Jun 11, 2014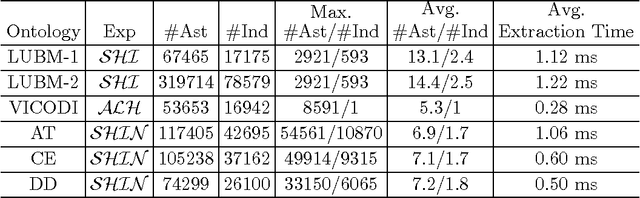
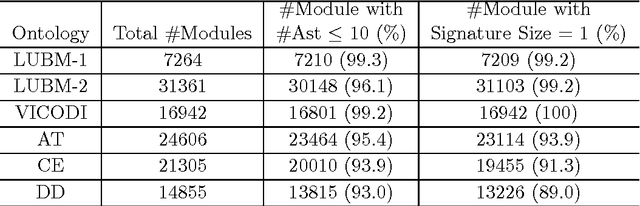
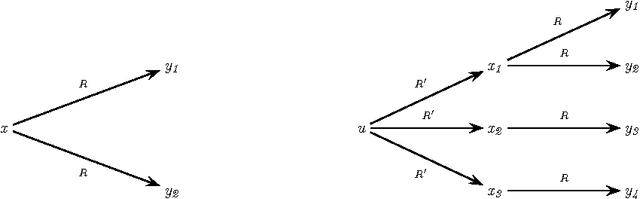
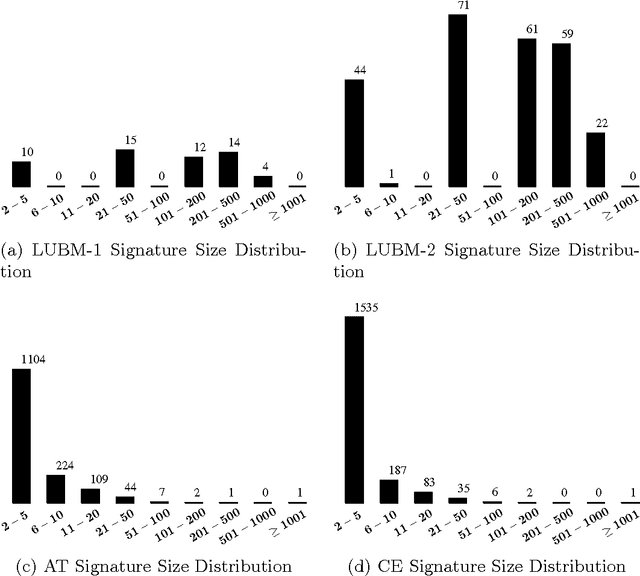
The extraction of logically-independent fragments out of an ontology ABox can be useful for solving the tractability problem of querying ontologies with large ABoxes. In this paper, we propose a formal definition of an ABox module, such that it guarantees complete preservation of facts about a given set of individuals, and thus can be reasoned independently w.r.t. the ontology TBox. With ABox modules of this type, isolated or distributed (parallel) ABox reasoning becomes feasible, and more efficient data retrieval from ontology ABoxes can be attained. To compute such an ABox module, we present a theoretical approach and also an approximation for $\mathcal{SHIQ}$ ontologies. Evaluation of the module approximation on different types of ontologies shows that, on average, extracted ABox modules are significantly smaller than the entire ABox, and the time for ontology reasoning based on ABox modules can be improved significantly.
Off-Policy General Value Functions to Represent Dynamic Role Assignments in RoboCup 3D Soccer Simulation
Feb 18, 2014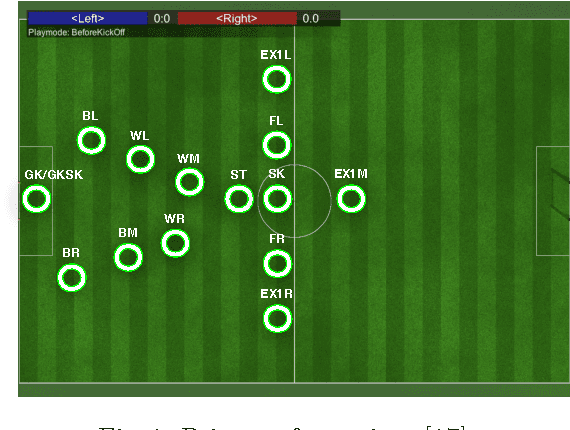

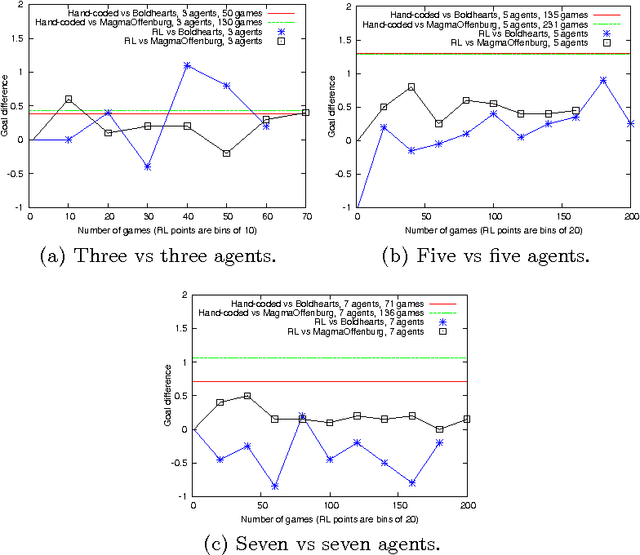

Collecting and maintaining accurate world knowledge in a dynamic, complex, adversarial, and stochastic environment such as the RoboCup 3D Soccer Simulation is a challenging task. Knowledge should be learned in real-time with time constraints. We use recently introduced Off-Policy Gradient Descent algorithms within Reinforcement Learning that illustrate learnable knowledge representations for dynamic role assignments. The results show that the agents have learned competitive policies against the top teams from the RoboCup 2012 competitions for three vs three, five vs five, and seven vs seven agents. We have explicitly used subsets of agents to identify the dynamics and the semantics for which the agents learn to maximize their performance measures, and to gather knowledge about different objectives, so that all agents participate effectively and efficiently within the group.