 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderwater autonomous mapping and characterization of marine debris in urban water bodies
Aug 01, 2022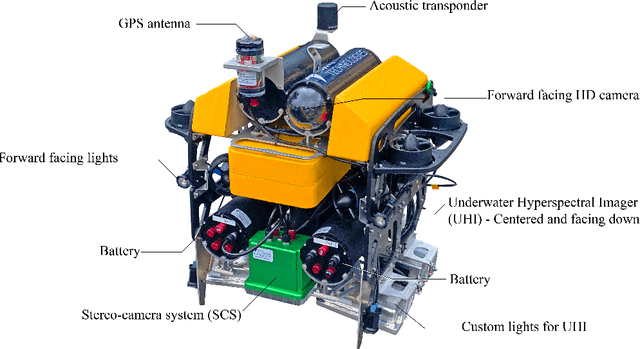
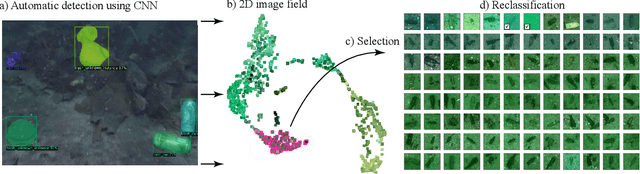
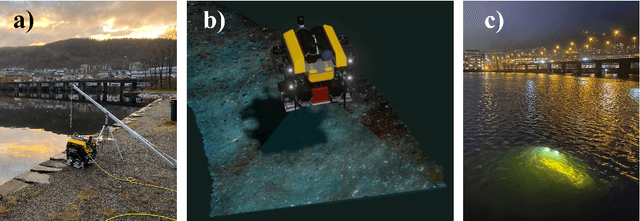
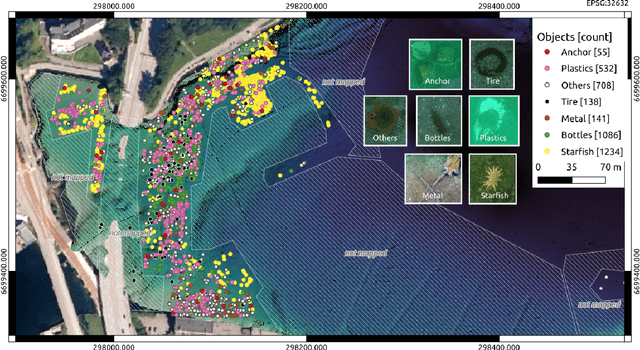
Marine debris originating from human activity has been accumulating in underwater environments such as oceans, lakes, and rivers for decades. The extent, type, and amount of waste is hard to assess as the exact mechanisms for spread are not understood, yielding unknown consequences for the marine environment and human health. Methods for detecting and mapping marine debris is therefore vital in order to gain insight into pollution dynamics, which in turn can be used to effectively plan and execute physical removal. Using an autonomous underwater vehicle (AUV), equipped with an underwater hyperspectral imager (UHI) and stereo-camera, marine debris was autonomously detected, mapped and quantified in the sheltered bay Store Lungegaardsvann in Bergen, Norway.
Learning excursion sets of vector-valued Gaussian random fields for autonomous ocean sampling
Jul 07, 2020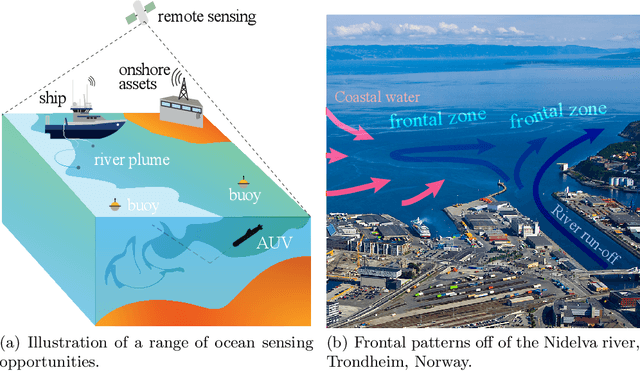

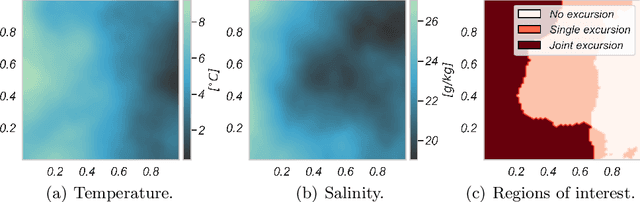
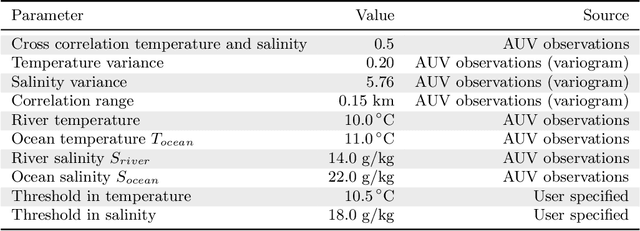
Improving and optimizing oceanographic sampling is a crucial task for marine science and maritime resource management. Faced with limited resources in understanding processes in the water-column, the combination of statistics and autonomous systems provide new opportunities for experimental design. In this work we develop efficient spatial sampling methods for characterizing regions defined by simultaneous exceedances above prescribed thresholds of several responses, with an application focus on mapping coastal ocean phenomena based on temperature and salinity measurements. Specifically, we define a design criterion based on uncertainty in the excursions of vector-valued Gaussian random fields, and derive tractable expressions for the expected integrated Bernoulli variance reduction in such a framework. We demonstrate how this criterion can be used to prioritize sampling efforts at locations that are ambiguous, making exploration more effective. We use simulations to study and compare properties of the considered approaches, followed by results from field deployments with an autonomous underwater vehicle as part of a study mapping the boundary of a river plume. The results demonstrate the potential of combining statistical methods and robotic platforms to effectively inform and execute data-driven environmental sampling.