 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Gaussian Processes for Efficient Fine-Grained Traffic Speed Prediction
Aug 27, 2017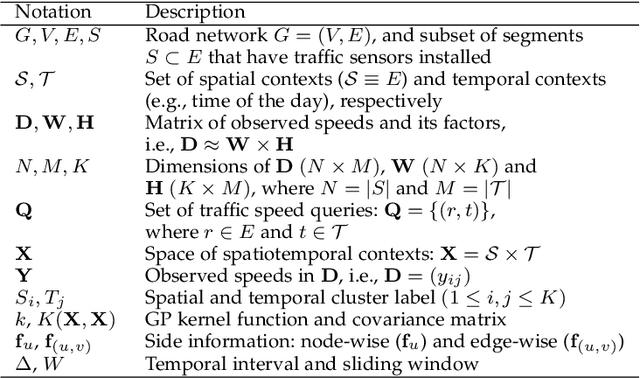
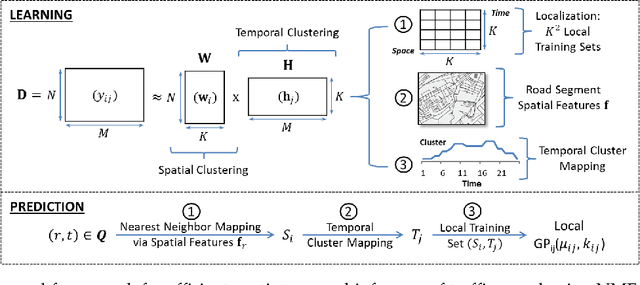
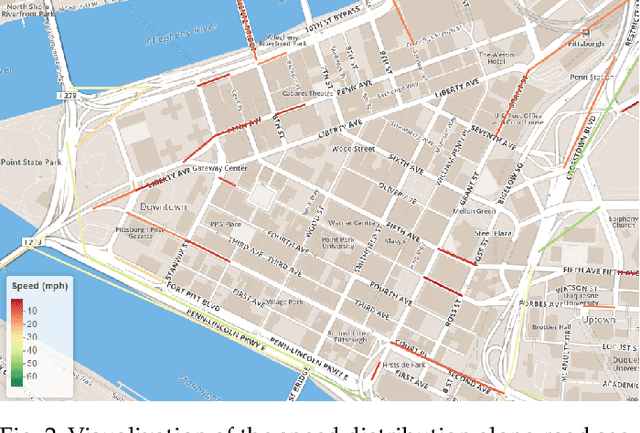

Traffic speed is a key indicator for the efficiency of an urban transportation system. Accurate modeling of the spatiotemporally varying traffic speed thus plays a crucial role in urban planning and development. This paper addresses the problem of efficient fine-grained traffic speed prediction using big traffic data obtained from static sensors. Gaussian processes (GPs) have been previously used to model various traffic phenomena, including flow and speed. However, GPs do not scale with big traffic data due to their cubic time complexity. In this work, we address their efficiency issues by proposing local GPs to learn from and make predictions for correlated subsets of data. The main idea is to quickly group speed variables in both spatial and temporal dimensions into a finite number of clusters, so that future and unobserved traffic speed queries can be heuristically mapped to one of such clusters. A local GP corresponding to that cluster can then be trained on the fly to make predictions in real-time. We call this method localization. We use non-negative matrix factorization for localization and propose simple heuristics for cluster mapping. We additionally leverage on the expressiveness of GP kernel functions to model road network topology and incorporate side information. Extensive experiments using real-world traffic data collected in the two U.S. cities of Pittsburgh and Washington, D.C., show that our proposed local GPs significantly improve both runtime performances and prediction accuracies compared to the baseline global and local GPs.