 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrashDet: Iterative Neural Architecture Search for Efficient Waste Detection
Dec 23, 2025This paper addresses trash detection on the TACO dataset under strict TinyML constraints using an iterative hardware-aware neural architecture search framework targeting edge and IoT devices. The proposed method constructs a Once-for-All-style ResDets supernet and performs iterative evolutionary search that alternates between backbone and neck/head optimization, supported by a population passthrough mechanism and an accuracy predictor to reduce search cost and improve stability. This framework yields a family of deployment-ready detectors, termed TrashDets. On a five-class TACO subset (paper, plastic, bottle, can, cigarette), the strongest variant, TrashDet-l, achieves 19.5 mAP50 with 30.5M parameters, improving accuracy by up to 3.6 mAP50 over prior detectors while using substantially fewer parameters. The TrashDet family spans 1.2M to 30.5M parameters with mAP50 values between 11.4 and 19.5, providing scalable detector options for diverse TinyML deployment budgets on resource-constrained hardware. On the MAX78002 microcontroller with the TrashNet dataset, two specialized variants, TrashDet-ResNet and TrashDet-MBNet, jointly dominate the ai87-fpndetector baseline, with TrashDet-ResNet achieving 7525~$μ$J energy per inference at 26.7 ms latency and 37.45 FPS, and TrashDet-MBNet improving mAP50 by 10.2%; together they reduce energy consumption by up to 88%, latency by up to 78%, and average power by up to 53% compared to existing TinyML detectors.
An Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
FACETS: Efficient Once-for-all Object Detection via Constrained Iterative Search
Mar 27, 2025Neural Architecture Search (NAS) for deep learning object detection frameworks typically involves multiple modules, each performing distinct tasks. These modules contribute to a vast search space, resulting in searches that can take several GPU hours or even days, depending on the complexity of the search space. This makes joint optimization both challenging and computationally expensive. Furthermore, satisfying target device constraints across modules adds additional complexity to the optimization process. To address these challenges, we propose \textbf{FACETS}, e\textbf{\underline{F}}ficient Once-for-\textbf{\underline{A}}ll Object Detection via \textbf{\underline{C}}onstrained it\textbf{\underline{E}}ra\textbf{\underline{T}}ive\textbf{\underline{S}}earch, a novel unified iterative NAS method that refines the architecture of all modules in a cyclical manner. FACETS leverages feedback from previous iterations, alternating between fixing one module's architecture and optimizing the others. This approach reduces the overall search space while preserving interdependencies among modules and incorporates constraints based on the target device's computational budget. In a controlled comparison against progressive and single-module search strategies, FACETS achieves architectures with up to $4.75\%$ higher accuracy twice as fast as progressive search strategies in earlier stages, while still being able to achieve a global optimum. Moreover, FACETS demonstrates the ability to iteratively refine the search space, producing better performing architectures over time. The refined search space yields candidates with a mean accuracy up to $27\%$ higher than global search and $5\%$ higher than progressive search methods via random sampling.
Distributed Perception Aware Safe Leader Follower System via Control Barrier Methods
Sep 17, 2024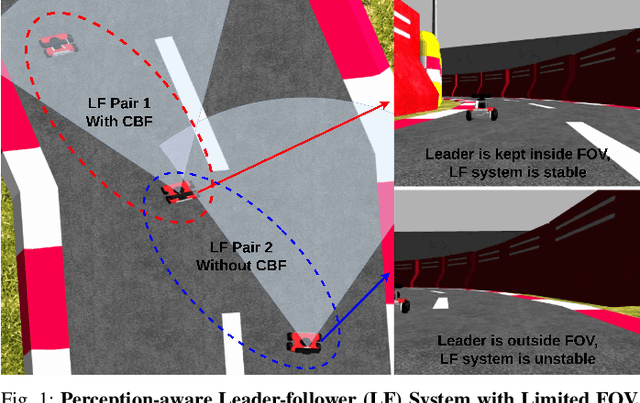
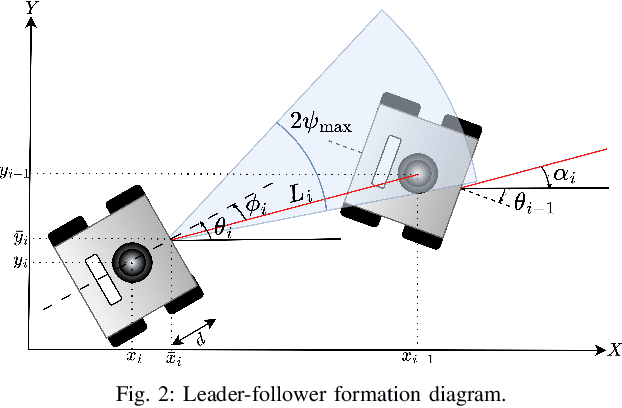
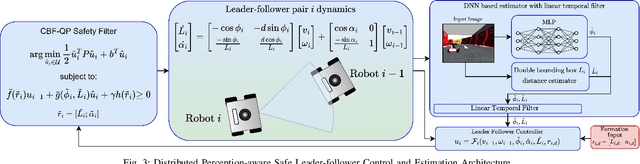
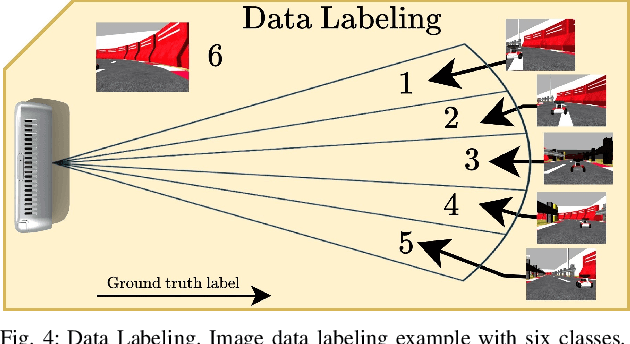
This paper addresses a distributed leader-follower formation control problem for a group of agents, each using a body-fixed camera with a limited field of view (FOV) for state estimation. The main challenge arises from the need to coordinate the agents' movements with their cameras' FOV to maintain visibility of the leader for accurate and reliable state estimation. To address this challenge, we propose a novel perception-aware distributed leader-follower safe control scheme that incorporates FOV limits as state constraints. A Control Barrier Function (CBF) based quadratic program is employed to ensure the forward invariance of a safety set defined by these constraints. Furthermore, new neural network based and double bounding boxes based estimators, combined with temporal filters, are developed to estimate system states directly from real-time image data, providing consistent performance across various environments. Comparison results in the Gazebo simulator demonstrate the effectiveness and robustness of the proposed framework in two distinct environments.