 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarimetric Imaging for Perception
May 24, 2023Autonomous driving and advanced driver-assistance systems rely on a set of sensors and algorithms to perform the appropriate actions and provide alerts as a function of the driving scene. Typically, the sensors include color cameras, radar, lidar and ultrasonic sensors. Strikingly however, although light polarization is a fundamental property of light, it is seldom harnessed for perception tasks. In this work we analyze the potential for improvement in perception tasks when using an RGB-polarimetric camera, as compared to an RGB camera. We examine monocular depth estimation and free space detection during the middle of the day, when polarization is independent of subject heading, and show that a quantifiable improvement can be achieved for both of them using state-of-the-art deep neural networks, with a minimum of architectural changes. We also present a new dataset composed of RGB-polarimetric images, lidar scans, GNSS / IMU readings and free space segmentations that further supports developing perception algorithms that take advantage of light polarization.
3D-LaneNet: end-to-end 3D multiple lane detection
Nov 27, 2018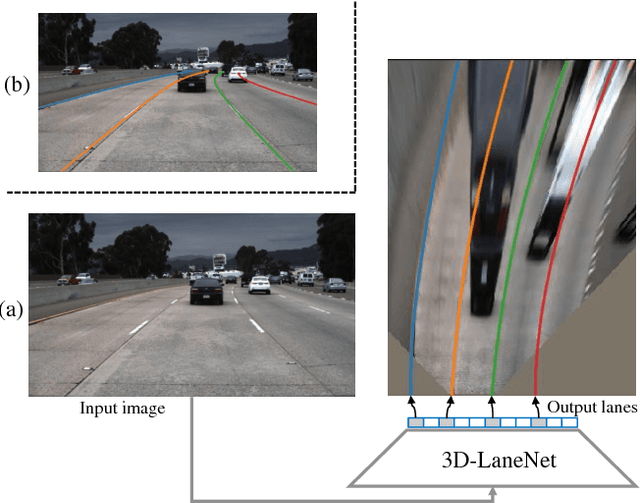
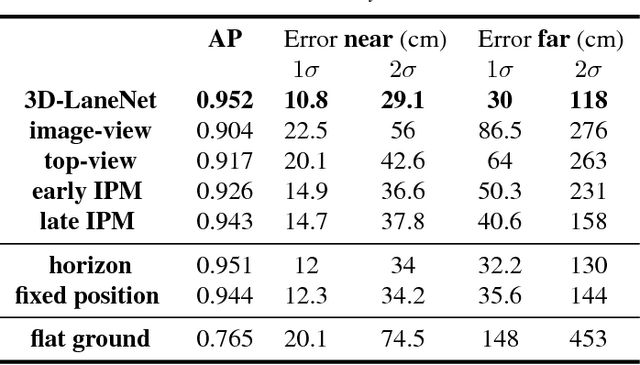
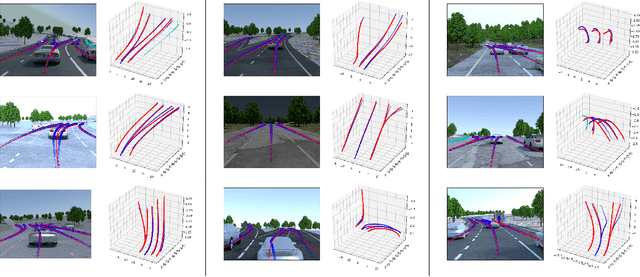
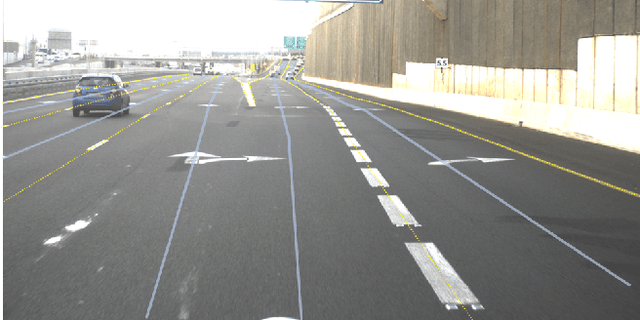
We introduce a network that directly predicts the 3D layout of lanes in a road scene from a single image. This work marks a first attempt to address this task with on-board sensing instead of relying on pre-mapped environments. Our network architecture, 3D-LaneNet, applies two new concepts: intra-network inverse-perspective mapping (IPM) and anchor-based lane representation. The intra-network IPM projection facilitates a dual-representation information flow in both regular image-view and top-view. An anchor-per-column output representation enables our end-to-end approach replacing common heuristics such as clustering and outlier rejection. In addition, our approach explicitly handles complex situations such as lane merges and splits. Promising results are shown on a new 3D lane synthetic dataset. For comparison with existing methods, we verify our approach on the image-only tuSimple lane detection benchmark and reach competitive performance.