 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D-LaneNet: end-to-end 3D multiple lane detection
Nov 27, 2018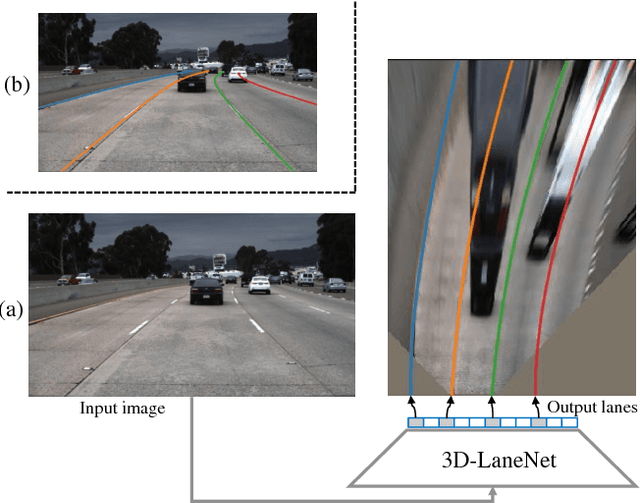
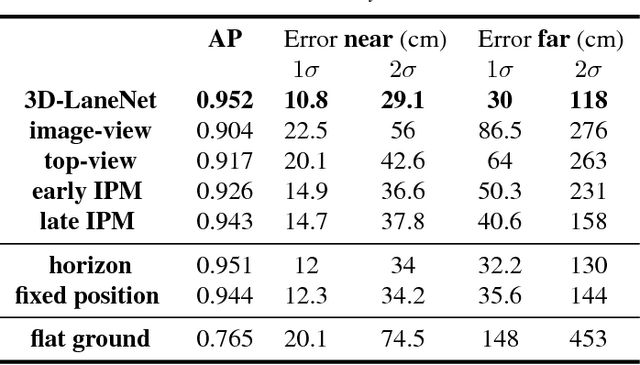
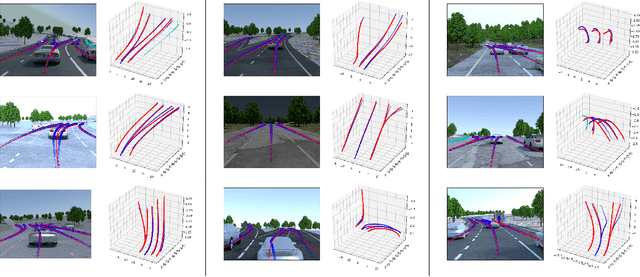
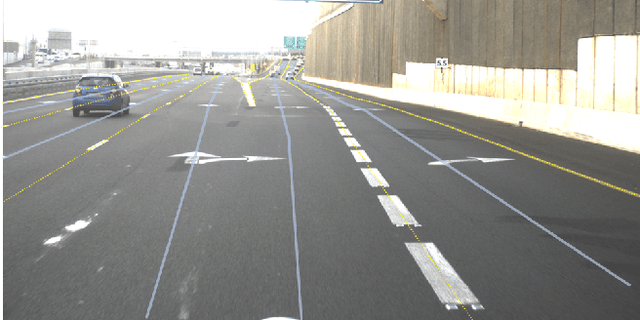
We introduce a network that directly predicts the 3D layout of lanes in a road scene from a single image. This work marks a first attempt to address this task with on-board sensing instead of relying on pre-mapped environments. Our network architecture, 3D-LaneNet, applies two new concepts: intra-network inverse-perspective mapping (IPM) and anchor-based lane representation. The intra-network IPM projection facilitates a dual-representation information flow in both regular image-view and top-view. An anchor-per-column output representation enables our end-to-end approach replacing common heuristics such as clustering and outlier rejection. In addition, our approach explicitly handles complex situations such as lane merges and splits. Promising results are shown on a new 3D lane synthetic dataset. For comparison with existing methods, we verify our approach on the image-only tuSimple lane detection benchmark and reach competitive performance.