 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Computational Complexity of Circuit Discovery for Inner Interpretability
Oct 10, 2024



Many proposed applications of neural networks in machine learning, cognitive/brain science, and society hinge on the feasibility of inner interpretability via circuit discovery. This calls for empirical and theoretical explorations of viable algorithmic options. Despite advances in the design and testing of heuristics, there are concerns about their scalability and faithfulness at a time when we lack understanding of the complexity properties of the problems they are deployed to solve. To address this, we study circuit discovery with classical and parameterized computational complexity theory: (1) we describe a conceptual scaffolding to reason about circuit finding queries in terms of affordances for description, explanation, prediction and control; (2) we formalize a comprehensive set of queries that capture mechanistic explanation, and propose a formal framework for their analysis; (3) we use it to settle the complexity of many query variants and relaxations of practical interest on multi-layer perceptrons (part of, e.g., transformers). Our findings reveal a challenging complexity landscape. Many queries are intractable (NP-hard, $\Sigma^p_2$-hard), remain fixed-parameter intractable (W[1]-hard) when constraining model/circuit features (e.g., depth), and are inapproximable under additive, multiplicative, and probabilistic approximation schemes. To navigate this landscape, we prove there exist transformations to tackle some of these hard problems (NP- vs. $\Sigma^p_2$-complete) with better-understood heuristics, and prove the tractability (PTIME) or fixed-parameter tractability (FPT) of more modest queries which retain useful affordances. This framework allows us to understand the scope and limits of interpretability queries, explore viable options, and compare their resource demands among existing and future architectures.
Environmental Sensing Options for Robot Teams: A Computational Complexity Perspective
May 10, 2022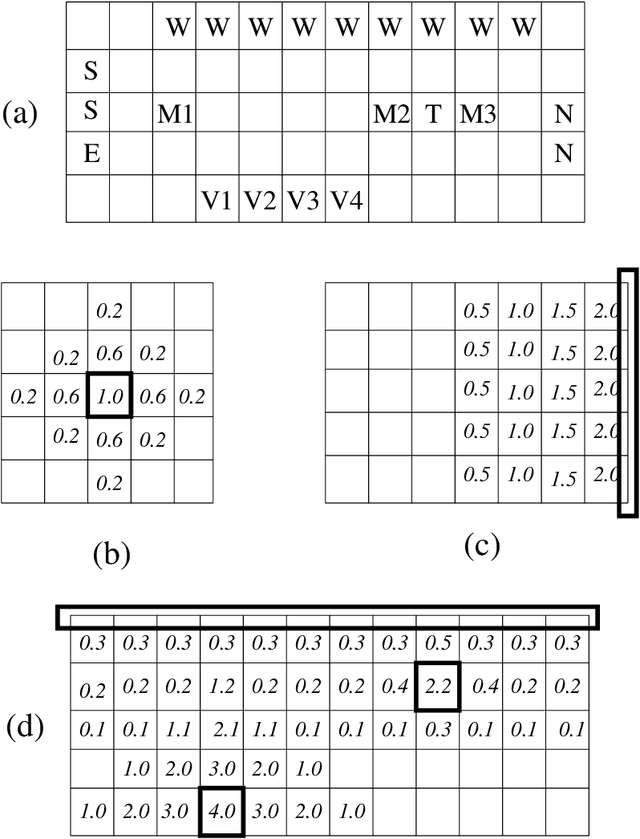
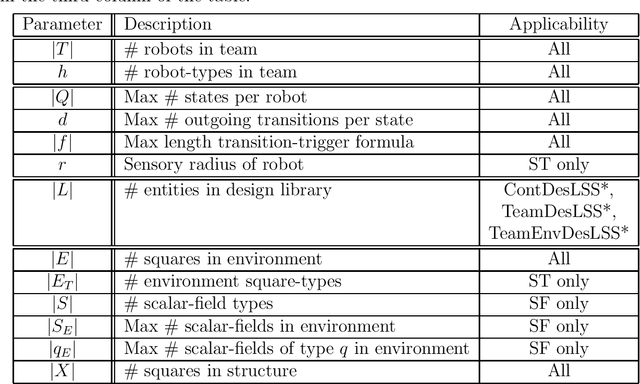
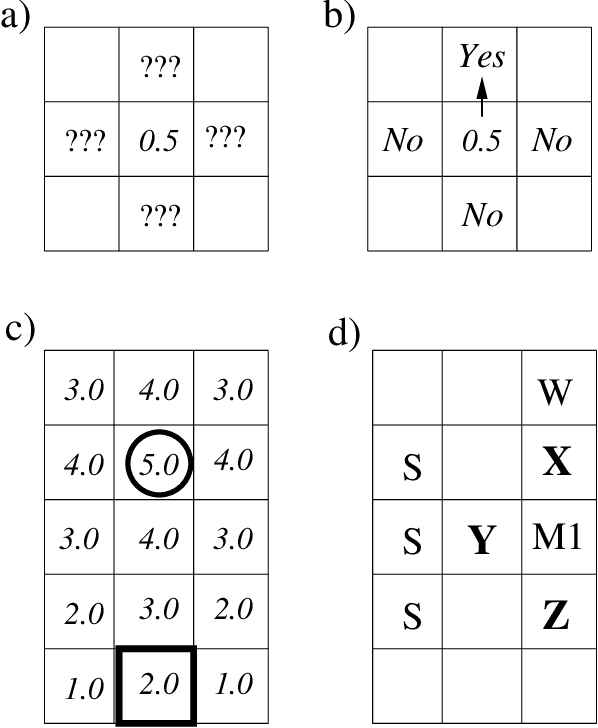
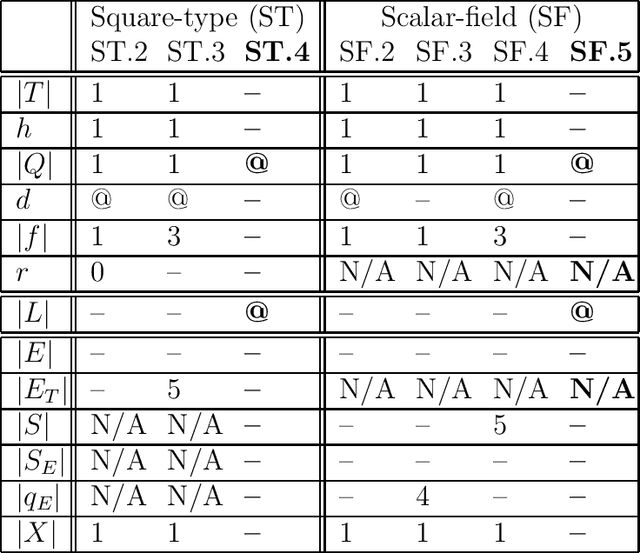
Visual and scalar-field (e.g., chemical) sensing are two of the options robot teams can use to perceive their environments when performing tasks. We give the first comparison of the computational characteristic of visual and scalar-field sensing, phrased in terms of the computational complexities of verifying and designing teams of robots to efficiently and robustly perform distributed construction tasks. This is done relative a basic model in which teams of robots with deterministic finite-state controllers operate in a synchronous error-free manner in 2D grid-based environments. Our results show that for both types of sensing, all of our problems are polynomial-time intractable in general and remain intractable under a variety of restrictions on parameters characterizing robot controllers, teams, and environments. That being said, these results also include restricted situations for each of our problems in which those problems are effectively polynomial-time tractable. Though there are some differences, our results suggest that (at least in this stage of our investigation) verification and design problems relative to visual and scalar-field sensing have roughly the same patterns and types of tractability and intractability results.
Exploring Viable Algorithmic Options for Learning from Demonstration (LfD): A Parameterized Complexity Approach
May 10, 2022



The key to reconciling the polynomial-time intractability of many machine learning tasks in the worst case with the surprising solvability of these tasks by heuristic algorithms in practice seems to be exploiting restrictions on real-world data sets. One approach to investigating such restrictions is to analyze why heuristics perform well under restrictions. A complementary approach would be to systematically determine under which sets of restrictions efficient and reliable machine learning algorithms do and do not exist. In this paper, we show how such a systematic exploration of algorithmic options can be done using parameterized complexity analysis, As an illustrative example, we give the first parameterized complexity analysis of batch and incremental policy inference under Learning from Demonstration (LfD). Relative to a basic model of LfD, we show that none of our problems can be solved efficiently either in general or relative to a number of (often simultaneous) restrictions on environments, demonstrations, and policies. We also give the first known restrictions under which efficient solvability is possible and discuss the implications of our solvability and unsolvability results for both our basic model of LfD and more complex models of LfD used in practice.
Computational Complexity of Segmentation
Feb 06, 2022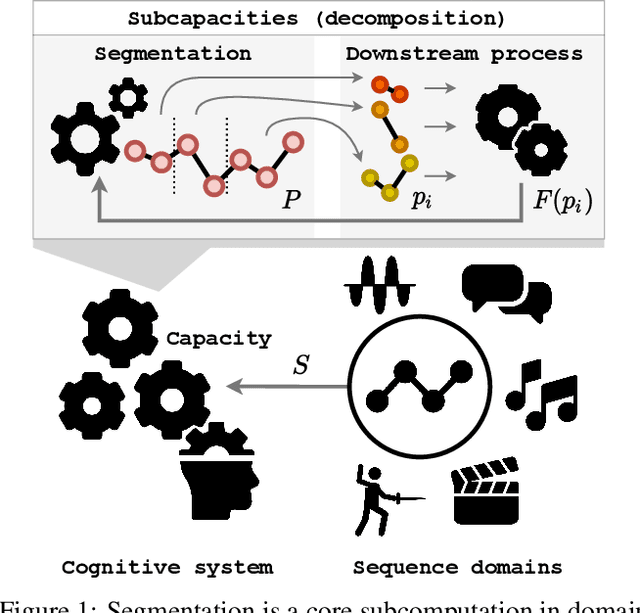
Computational feasibility is a widespread concern that guides the framing and modeling of biological and artificial intelligence. The specification of cognitive system capacities is often shaped by unexamined intuitive assumptions about the search space and complexity of a subcomputation. However, a mistaken intuition might make such initial conceptualizations misleading for what empirical questions appear relevant later on. We undertake here computational-level modeling and complexity analyses of segmentation - a widely hypothesized subcomputation that plays a requisite role in explanations of capacities across domains - as a case study to show how crucial it is to formally assess these assumptions. We mathematically prove two sets of results regarding hardness and search space size that may run counter to intuition, and position their implications with respect to existing views on the subcapacity.