 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo We Run Large-scale Multi-Robot Systems on the Edge? More Evidence for Two-Phase Performance in System Size Scaling
Oct 18, 2023With increasing numbers of mobile robots arriving in real-world applications, more robots coexist in the same space, interact, and possibly collaborate. Methods to provide such systems with system size scalability are known, for example, from swarm robotics. Example strategies are self-organizing behavior, a strict decentralized approach, and limiting the robot-robot communication. Despite applying such strategies, any multi-robot system breaks above a certain critical system size (i.e., number of robots) as too many robots share a resource (e.g., space, communication channel). We provide additional evidence based on simulations, that at these critical system sizes, the system performance separates into two phases: nearly optimal and minimal performance. We speculate that in real-world applications that are configured for optimal system size, the supposedly high-performing system may actually live on borrowed time as it is on a transient to breakdown. We provide two modeling options (based on queueing theory and a population model) that may help to support this reasoning.
Environmental Sensing Options for Robot Teams: A Computational Complexity Perspective
May 10, 2022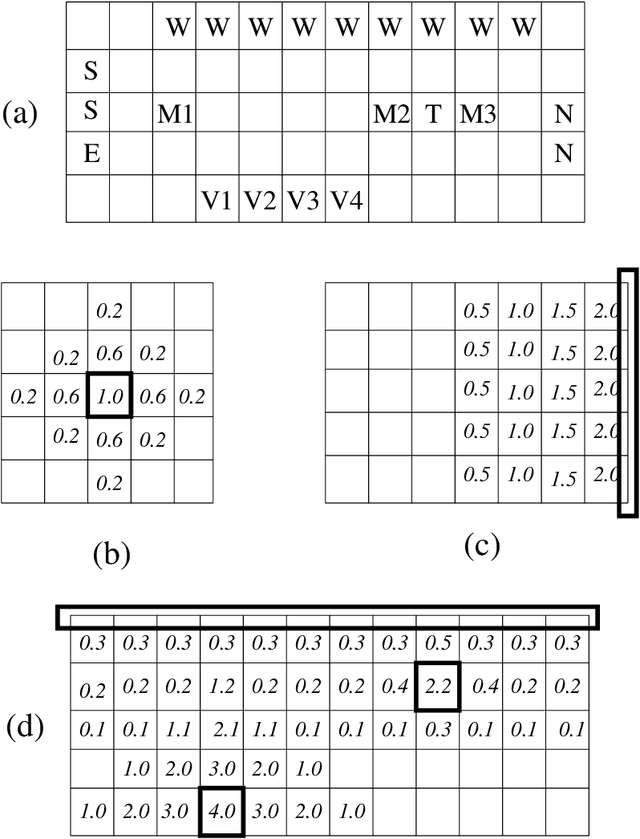
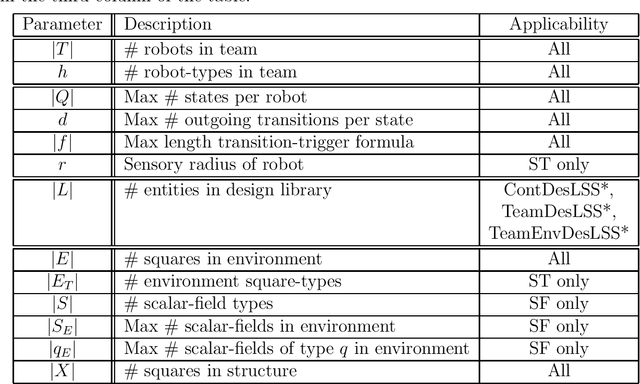
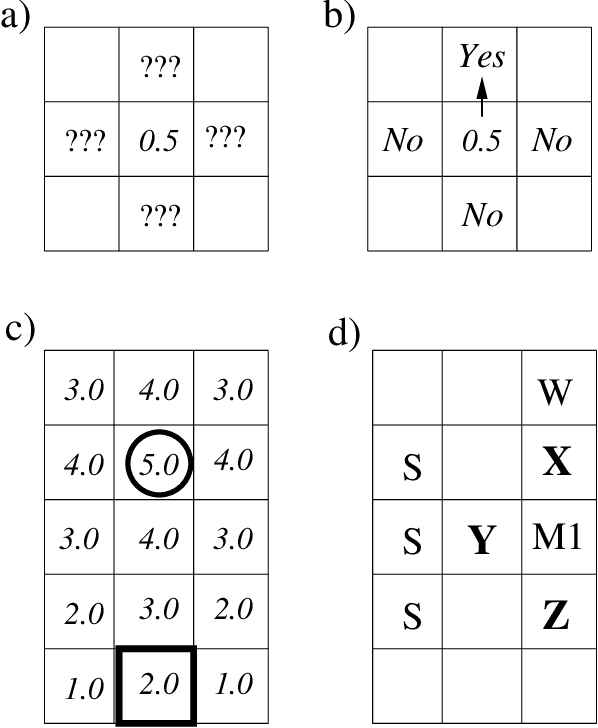
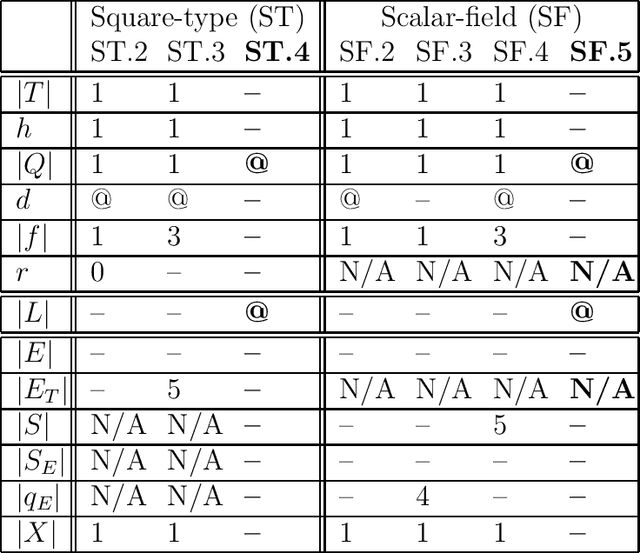
Visual and scalar-field (e.g., chemical) sensing are two of the options robot teams can use to perceive their environments when performing tasks. We give the first comparison of the computational characteristic of visual and scalar-field sensing, phrased in terms of the computational complexities of verifying and designing teams of robots to efficiently and robustly perform distributed construction tasks. This is done relative a basic model in which teams of robots with deterministic finite-state controllers operate in a synchronous error-free manner in 2D grid-based environments. Our results show that for both types of sensing, all of our problems are polynomial-time intractable in general and remain intractable under a variety of restrictions on parameters characterizing robot controllers, teams, and environments. That being said, these results also include restricted situations for each of our problems in which those problems are effectively polynomial-time tractable. Though there are some differences, our results suggest that (at least in this stage of our investigation) verification and design problems relative to visual and scalar-field sensing have roughly the same patterns and types of tractability and intractability results.
A Swarm of Simple Robots Constructing Planar Shapes
Apr 28, 2020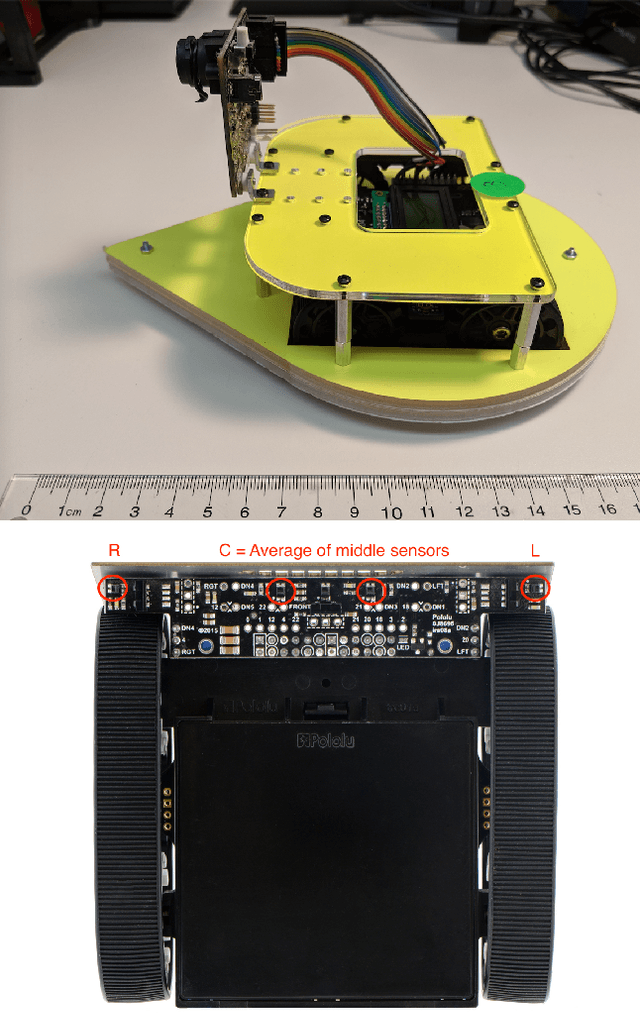
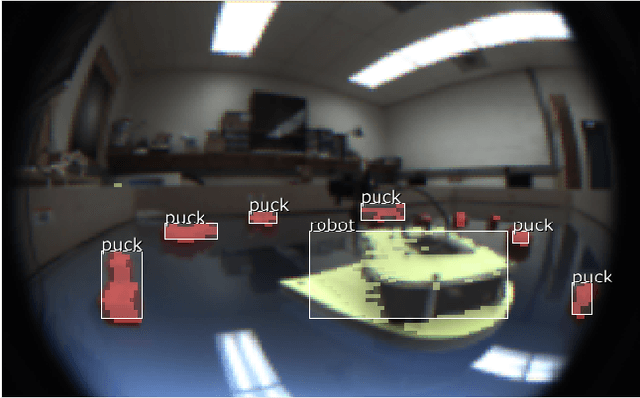
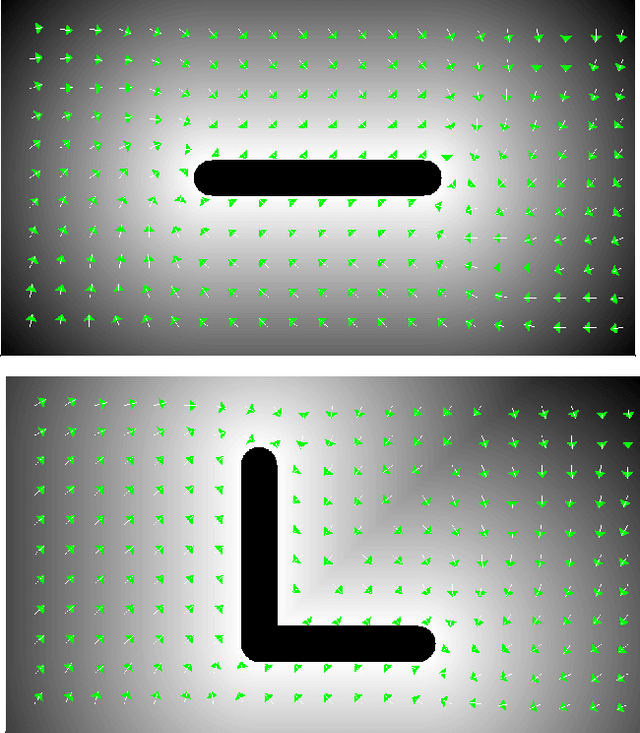
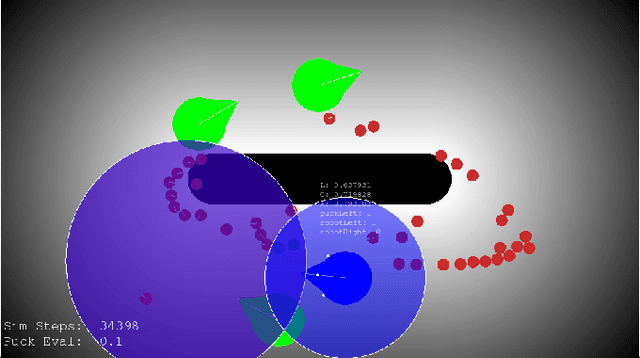
We present a new version of our previously proposed algorithm enabling a swarm of robots to construct a desired shape from objects in the plane. We also describe a hardware realization for this system which makes use of simple and readily sourced components. We refer to the task as planar construction which is the gathering of ambient objects into some desired shape. As an example application, a swarm of robots could use this algorithm to not only gather waste material into a pile, but shape that pile into a line for easy collection. The shape is specified by an image known as the scalar field. The scalar field serves an analogous role to the template pheromones that guide the construction of complex natural structures such as termite mounds. In addition to describing the algorithm and hardware platform, we develop some performance insights using a custom simulation environment and present experimental results on physical robots.