 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Conflict Resolution in Hierarchical Hypothesis Spaces
Mar 27, 2013

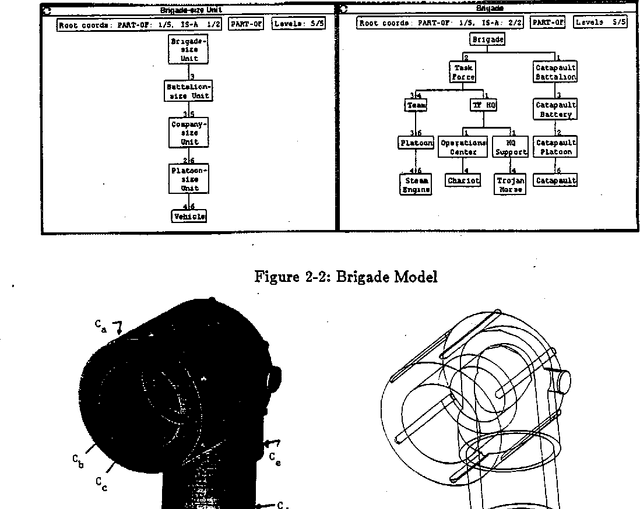
Artificial intelligence applications such as industrial robotics, military surveillance, and hazardous environment clean-up, require situation understanding based on partial, uncertain, and ambiguous or erroneous evidence. It is necessary to evaluate the relative likelihood of multiple possible hypotheses of the (current) situation faced by the decision making program. Often, the evidence and hypotheses are hierarchical in nature. In image understanding tasks, for example, evidence begins with raw imagery, from which ambiguous features are extracted which have multiple possible aggregations providing evidential support for the presence of multiple hypothesis of objects and terrain, which in turn aggregate in multiple ways to provide partial evidence for different interpretations of the ambient scene. Information fusion for military situation understanding has a similar evidence/hypothesis hierarchy from multiple sensor through message level interpretations, and also provides evidence at multiple levels of the doctrinal hierarchy of military forces.
Bayesian Inference for Radar Imagery Based Surveillance
Mar 27, 2013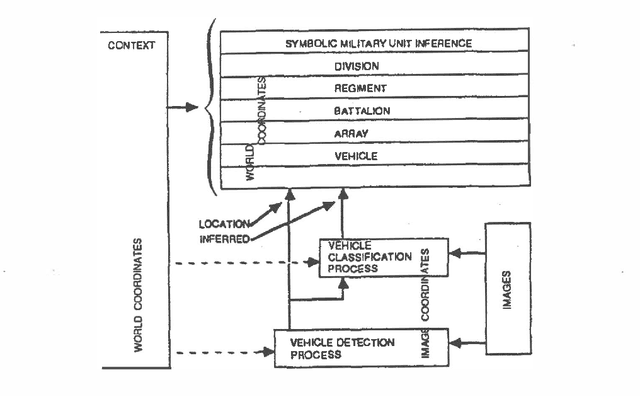
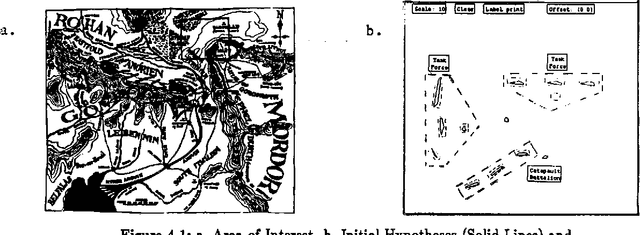
We are interested in creating an automated or semi-automated system with the capability of taking a set of radar imagery, collection parameters and a priori map and other tactical data, and producing likely interpretations of the possible military situations given the available evidence. This paper is concerned with the problem of the interpretation and computation of certainty or belief in the conclusions reached by such a system.
Bayesian Inference in Model-Based Machine Vision
Mar 27, 2013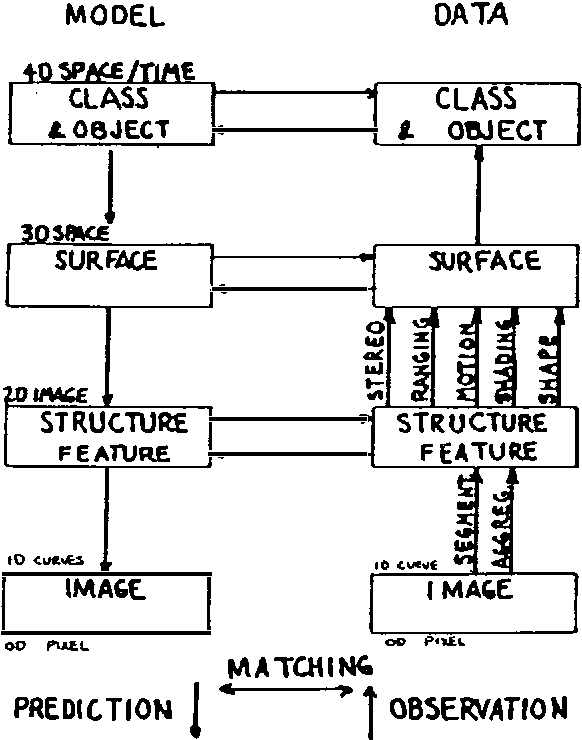
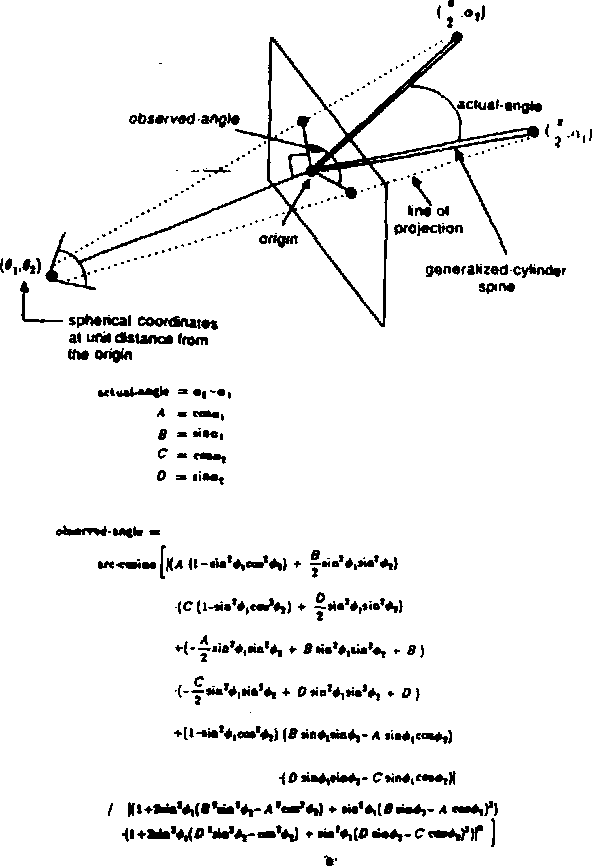
This is a preliminary version of visual interpretation integrating multiple sensors in SUCCESSOR, an intelligent, model-based vision system. We pursue a thorough integration of hierarchical Bayesian inference with comprehensive physical representation of objects and their relations in a system for reasoning with geometry, surface materials and sensor models in machine vision. Bayesian inference provides a framework for accruing_ probabilities to rank order hypotheses.
Utility-Based Control for Computer Vision
Mar 27, 2013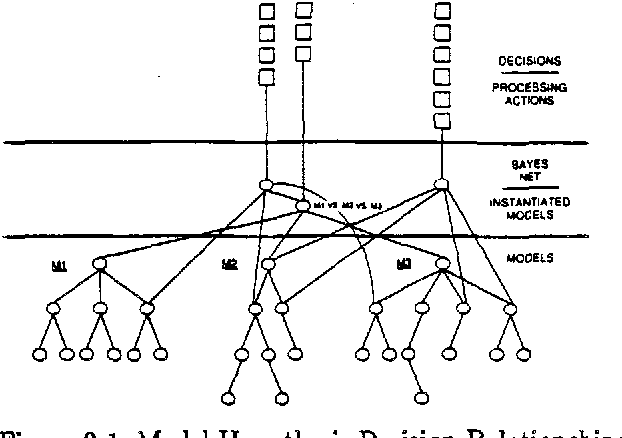
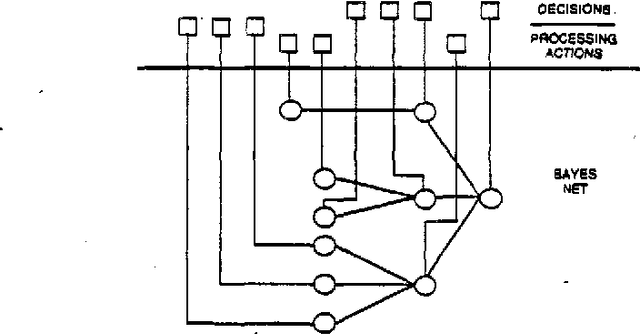
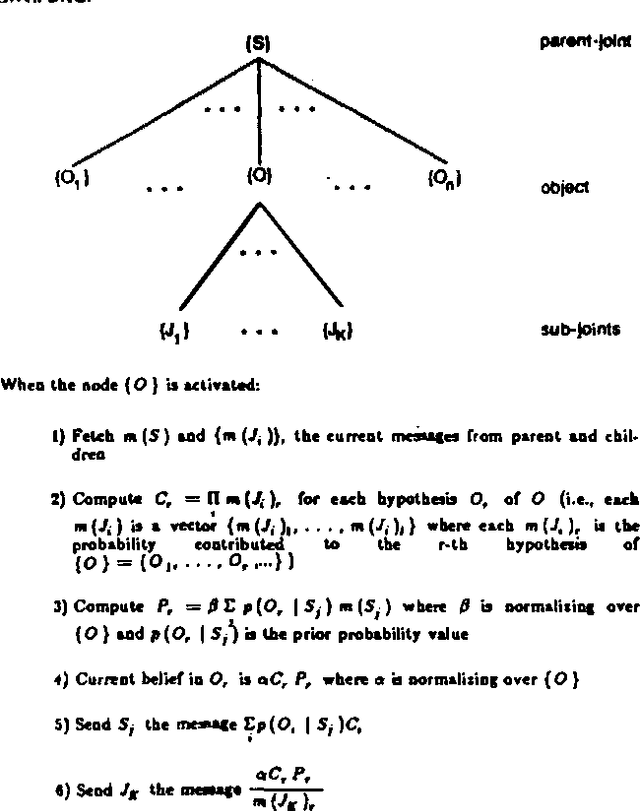
Several key issues arise in implementing computer vision recognition of world objects in terms of Bayesian networks. Computational efficiency is a driving force. Perceptual networks are very deep, typically fifteen levels of structure. Images are wide, e.g., an unspecified-number of edges may appear anywhere in an image 512 x 512 pixels or larger. For efficiency, we dynamically instantiate hypotheses of observed objects. The network is not fixed, but is created incrementally at runtime. Generation of hypotheses of world objects and indexing of models for recognition are important, but they are not considered here [4,11]. This work is aimed at near-term implementation with parallel computation in a radar surveillance system, ADRIES [5, 15], and a system for industrial part recognition, SUCCESSOR [2]. For many applications, vision must be faster to be practical and so efficiently controlling the machine vision process is critical. Perceptual operators may scan megapixels and may require minutes of computation time. It is necessary to avoid unnecessary sensor actions and computation. Parallel computation is available at several levels of processor capability. The potential for parallel, distributed computation for high-level vision means distributing non-homogeneous computations. This paper addresses the problem of task control in machine vision systems based on Bayesian probability models. We separate control and inference to extend the previous work [3] to maximize utility instead of probability. Maximizing utility allows adopting perceptual strategies for efficient information gathering with sensors and analysis of sensor data. Results of controlling machine vision via utility to recognize military situations are presented in this paper. Future work extends this to industrial part recognition for SUCCESSOR.
Model-based Influence Diagrams for Machine Vision
Mar 27, 2013
We show an approach to automated control of machine vision systems based on incremental creation and evaluation of a particular family of influence diagrams that represent hypotheses of imagery interpretation and possible subsequent processing decisions. In our approach, model-based machine vision techniques are integrated with hierarchical Bayesian inference to provide a framework for representing and matching instances of objects and relationships in imagery and for accruing probabilities to rank order conflicting scene interpretations. We extend a result of Tatman and Shachter to show that the sequence of processing decisions derived from evaluating the diagrams at each stage is the same as the sequence that would have been derived by evaluating the final influence diagram that contains all random variables created during the run of the vision system.
Incremental Dynamic Construction of Layered Polytree Networks
Feb 27, 2013

Certain classes of problems, including perceptual data understanding, robotics, discovery, and learning, can be represented as incremental, dynamically constructed belief networks. These automatically constructed networks can be dynamically extended and modified as evidence of new individuals becomes available. The main result of this paper is the incremental extension of the singly connected polytree network in such a way that the network retains its singly connected polytree structure after the changes. The algorithm is deterministic and is guaranteed to have a complexity of single node addition that is at most of order proportional to the number of nodes (or size) of the network. Additional speed-up can be achieved by maintaining the path information. Despite its incremental and dynamic nature, the algorithm can also be used for probabilistic inference in belief networks in a fashion similar to other exact inference algorithms.
Learning Bayesian Networks from Incomplete Data with Stochastic Search Algorithms
Jan 23, 2013



This paper describes stochastic search approaches, including a new stochastic algorithm and an adaptive mutation operator, for learning Bayesian networks from incomplete data. This problem is characterized by a huge solution space with a highly multimodal landscape. State-of-the-art approaches all involve using deterministic approaches such as the expectation-maximization algorithm. These approaches are guaranteed to find local maxima, but do not explore the landscape for other modes. Our approach evolves structure and the missing data. We compare our stochastic algorithms and show they all produce accurate results.