 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Inference in Model-Based Machine Vision
Mar 27, 2013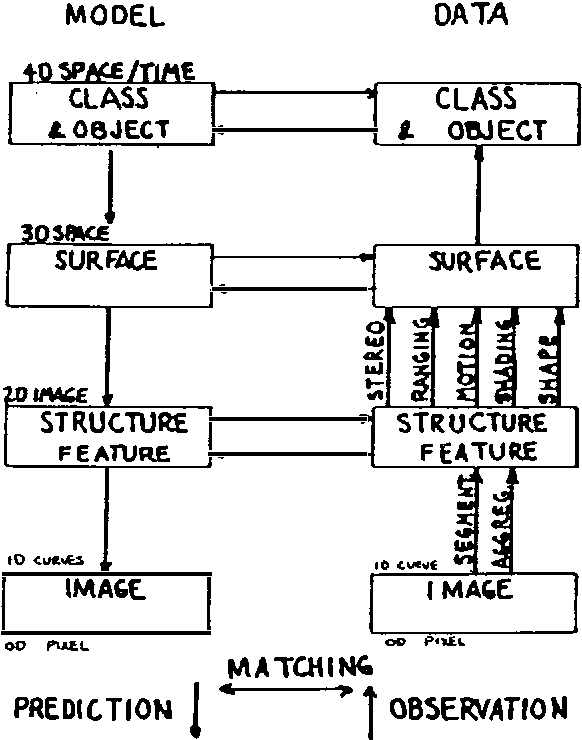
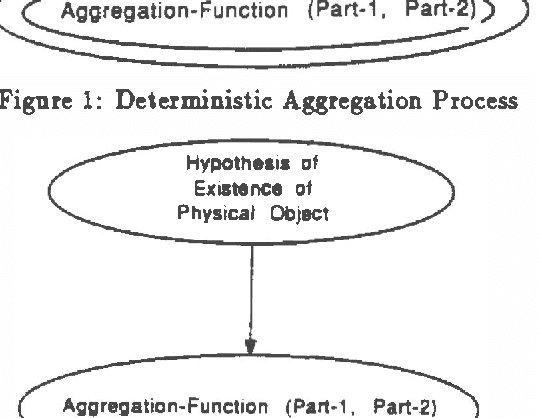
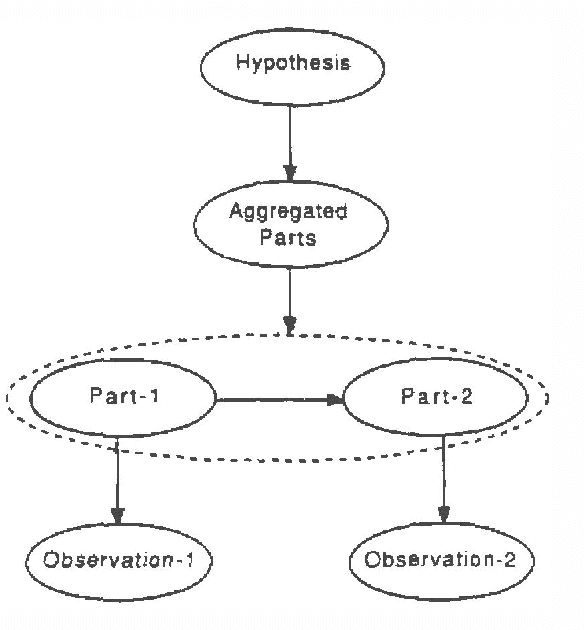
This is a preliminary version of visual interpretation integrating multiple sensors in SUCCESSOR, an intelligent, model-based vision system. We pursue a thorough integration of hierarchical Bayesian inference with comprehensive physical representation of objects and their relations in a system for reasoning with geometry, surface materials and sensor models in machine vision. Bayesian inference provides a framework for accruing_ probabilities to rank order hypotheses.
Utility-Based Control for Computer Vision
Mar 27, 2013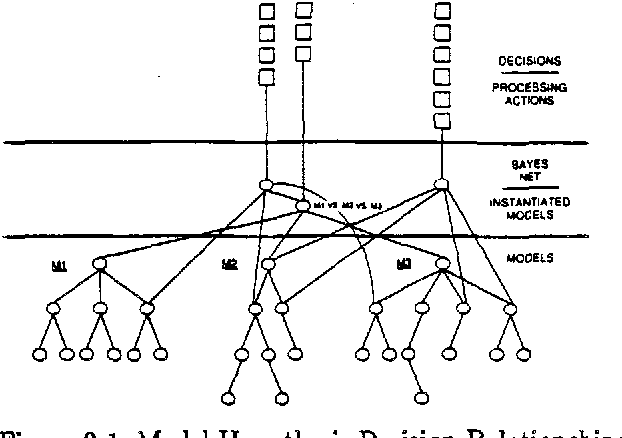
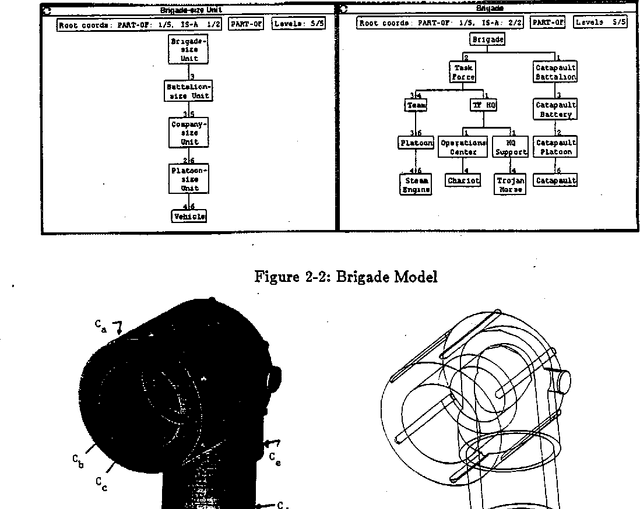
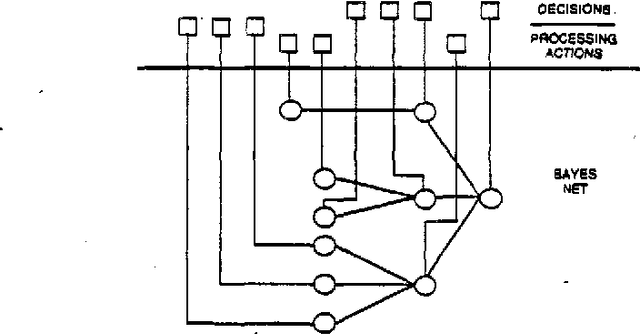
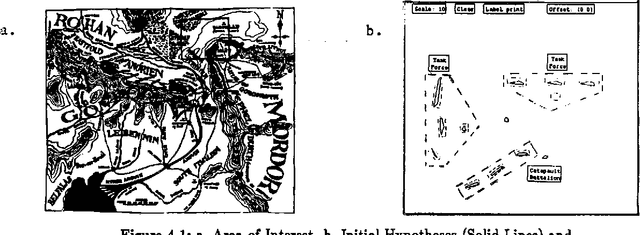
Several key issues arise in implementing computer vision recognition of world objects in terms of Bayesian networks. Computational efficiency is a driving force. Perceptual networks are very deep, typically fifteen levels of structure. Images are wide, e.g., an unspecified-number of edges may appear anywhere in an image 512 x 512 pixels or larger. For efficiency, we dynamically instantiate hypotheses of observed objects. The network is not fixed, but is created incrementally at runtime. Generation of hypotheses of world objects and indexing of models for recognition are important, but they are not considered here [4,11]. This work is aimed at near-term implementation with parallel computation in a radar surveillance system, ADRIES [5, 15], and a system for industrial part recognition, SUCCESSOR [2]. For many applications, vision must be faster to be practical and so efficiently controlling the machine vision process is critical. Perceptual operators may scan megapixels and may require minutes of computation time. It is necessary to avoid unnecessary sensor actions and computation. Parallel computation is available at several levels of processor capability. The potential for parallel, distributed computation for high-level vision means distributing non-homogeneous computations. This paper addresses the problem of task control in machine vision systems based on Bayesian probability models. We separate control and inference to extend the previous work [3] to maximize utility instead of probability. Maximizing utility allows adopting perceptual strategies for efficient information gathering with sensors and analysis of sensor data. Results of controlling machine vision via utility to recognize military situations are presented in this paper. Future work extends this to industrial part recognition for SUCCESSOR.
Model-based Influence Diagrams for Machine Vision
Mar 27, 2013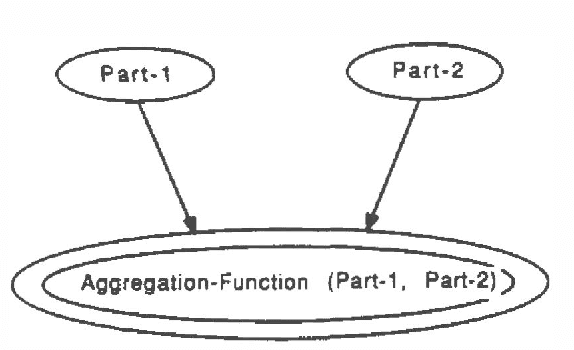
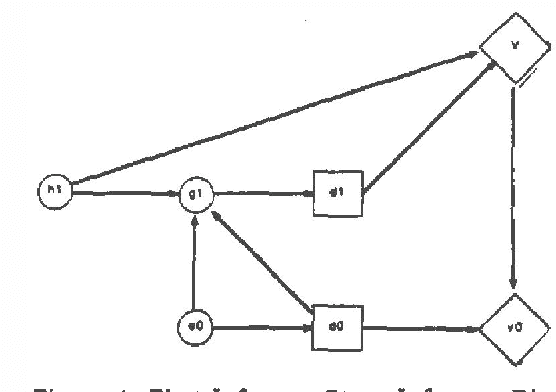
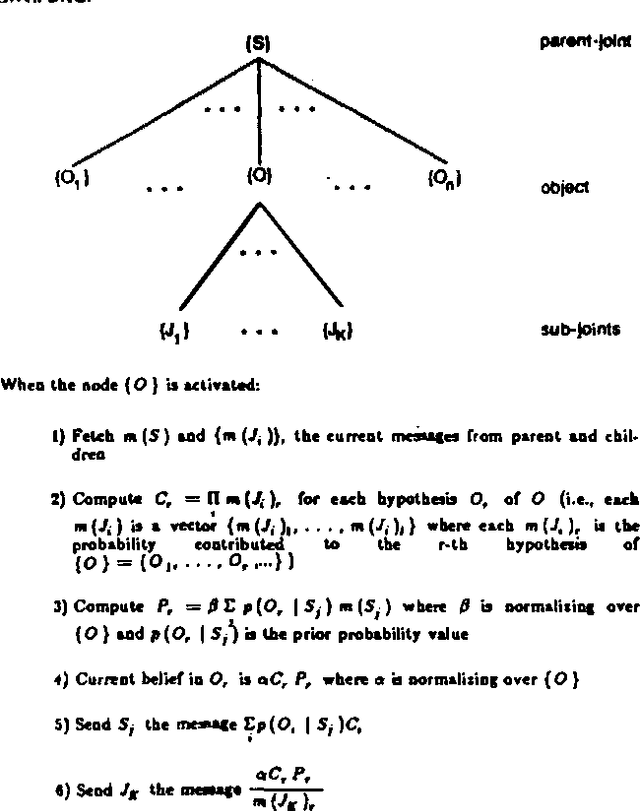
We show an approach to automated control of machine vision systems based on incremental creation and evaluation of a particular family of influence diagrams that represent hypotheses of imagery interpretation and possible subsequent processing decisions. In our approach, model-based machine vision techniques are integrated with hierarchical Bayesian inference to provide a framework for representing and matching instances of objects and relationships in imagery and for accruing probabilities to rank order conflicting scene interpretations. We extend a result of Tatman and Shachter to show that the sequence of processing decisions derived from evaluating the diagrams at each stage is the same as the sequence that would have been derived by evaluating the final influence diagram that contains all random variables created during the run of the vision system.