Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Inference in Model-Based Machine Vision
Mar 27, 2013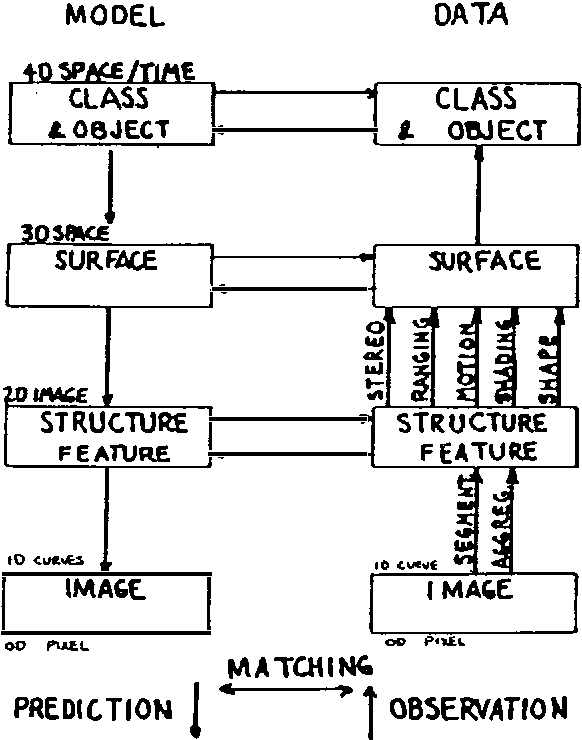
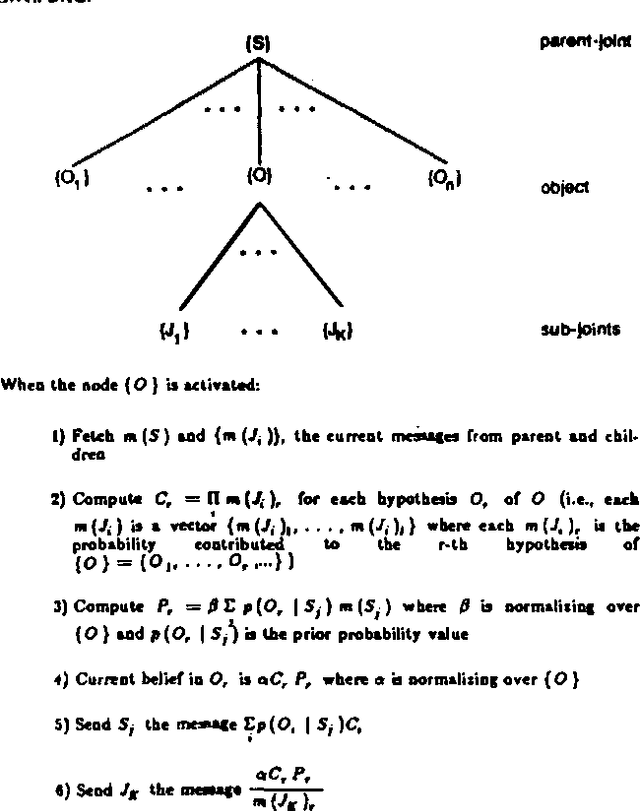
This is a preliminary version of visual interpretation integrating multiple sensors in SUCCESSOR, an intelligent, model-based vision system. We pursue a thorough integration of hierarchical Bayesian inference with comprehensive physical representation of objects and their relations in a system for reasoning with geometry, surface materials and sensor models in machine vision. Bayesian inference provides a framework for accruing_ probabilities to rank order hypotheses.
* Appears in Proceedings of the Third Conference on Uncertainty in
Artificial Intelligence (UAI1987)
Via