 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo Dataset for Surgical Phase, Keypoint, and Instrument Recognition in Laparoscopic Surgery (PhaKIR)
Nov 09, 2025Robotic- and computer-assisted minimally invasive surgery (RAMIS) is increasingly relying on computer vision methods for reliable instrument recognition and surgical workflow understanding. Developing such systems often requires large, well-annotated datasets, but existing resources often address isolated tasks, neglect temporal dependencies, or lack multi-center variability. We present the Surgical Procedure Phase, Keypoint, and Instrument Recognition (PhaKIR) dataset, comprising eight complete laparoscopic cholecystectomy videos recorded at three medical centers. The dataset provides frame-level annotations for three interconnected tasks: surgical phase recognition (485,875 frames), instrument keypoint estimation (19,435 frames), and instrument instance segmentation (19,435 frames). PhaKIR is, to our knowledge, the first multi-institutional dataset to jointly provide phase labels, instrument pose information, and pixel-accurate instrument segmentations, while also enabling the exploitation of temporal context since full surgical procedure sequences are available. It served as the basis for the PhaKIR Challenge as part of the Endoscopic Vision (EndoVis) Challenge at MICCAI 2024 to benchmark methods in surgical scene understanding, thereby further validating the dataset's quality and relevance. The dataset is publicly available upon request via the Zenodo platform.
Comparative validation of surgical phase recognition, instrument keypoint estimation, and instrument instance segmentation in endoscopy: Results of the PhaKIR 2024 challenge
Jul 22, 2025Reliable recognition and localization of surgical instruments in endoscopic video recordings are foundational for a wide range of applications in computer- and robot-assisted minimally invasive surgery (RAMIS), including surgical training, skill assessment, and autonomous assistance. However, robust performance under real-world conditions remains a significant challenge. Incorporating surgical context - such as the current procedural phase - has emerged as a promising strategy to improve robustness and interpretability. To address these challenges, we organized the Surgical Procedure Phase, Keypoint, and Instrument Recognition (PhaKIR) sub-challenge as part of the Endoscopic Vision (EndoVis) challenge at MICCAI 2024. We introduced a novel, multi-center dataset comprising thirteen full-length laparoscopic cholecystectomy videos collected from three distinct medical institutions, with unified annotations for three interrelated tasks: surgical phase recognition, instrument keypoint estimation, and instrument instance segmentation. Unlike existing datasets, ours enables joint investigation of instrument localization and procedural context within the same data while supporting the integration of temporal information across entire procedures. We report results and findings in accordance with the BIAS guidelines for biomedical image analysis challenges. The PhaKIR sub-challenge advances the field by providing a unique benchmark for developing temporally aware, context-driven methods in RAMIS and offers a high-quality resource to support future research in surgical scene understanding.
Motion-Corrected Moving Average: Including Post-Hoc Temporal Information for Improved Video Segmentation
Mar 05, 2024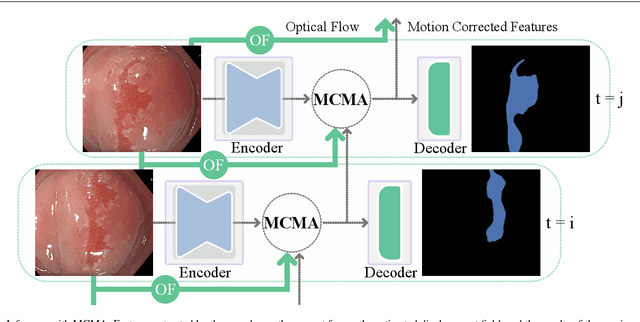
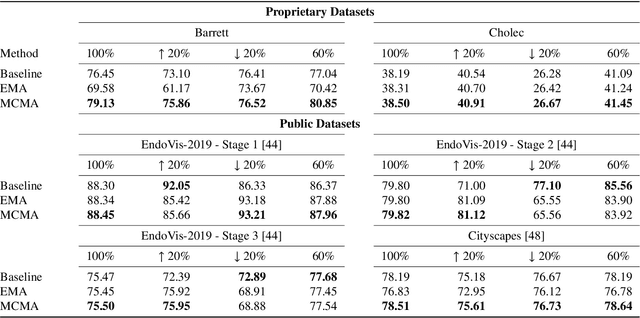
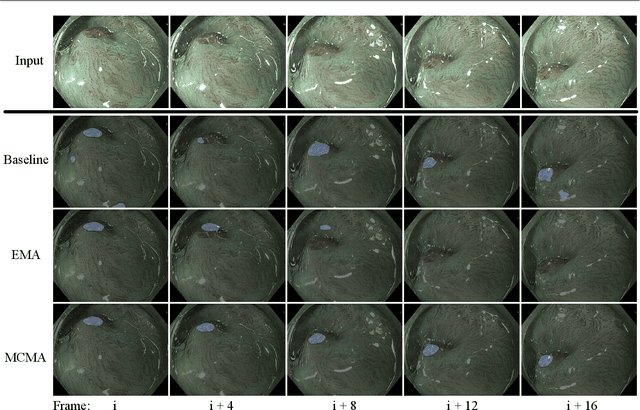
Real-time computational speed and a high degree of precision are requirements for computer-assisted interventions. Applying a segmentation network to a medical video processing task can introduce significant inter-frame prediction noise. Existing approaches can reduce inconsistencies by including temporal information but often impose requirements on the architecture or dataset. This paper proposes a method to include temporal information in any segmentation model and, thus, a technique to improve video segmentation performance without alterations during training or additional labeling. With Motion-Corrected Moving Average, we refine the exponential moving average between the current and previous predictions. Using optical flow to estimate the movement between consecutive frames, we can shift the prior term in the moving-average calculation to align with the geometry of the current frame. The optical flow calculation does not require the output of the model and can therefore be performed in parallel, leading to no significant runtime penalty for our approach. We evaluate our approach on two publicly available segmentation datasets and two proprietary endoscopic datasets and show improvements over a baseline approach.
Methods and datasets for segmentation of minimally invasive surgical instruments in endoscopic images and videos: A review of the state of the art
Apr 25, 2023In the field of computer- and robot-assisted minimally invasive surgery, enormous progress has been made in recent years based on the recognition of surgical instruments in endoscopic images. Especially the determination of the position and type of the instruments is of great interest here. Current work involves both spatial and temporal information with the idea, that the prediction of movement of surgical tools over time may improve the quality of final segmentations. The provision of publicly available datasets has recently encouraged the development of new methods, mainly based on deep learning. In this review, we identify datasets used for method development and evaluation, as well as quantify their frequency of use in the literature. We further present an overview of the current state of research regarding the segmentation and tracking of minimally invasive surgical instruments in endoscopic images. The paper focuses on methods that work purely visually without attached markers of any kind on the instruments, taking into account both single-frame segmentation approaches as well as those involving temporal information. A discussion of the reviewed literature is provided, highlighting existing shortcomings and emphasizing available potential for future developments. The publications considered were identified through the platforms Google Scholar, Web of Science, and PubMed. The search terms used were "instrument segmentation", "instrument tracking", "surgical tool segmentation", and "surgical tool tracking" and result in 408 articles published between 2015 and 2022 from which 109 were included using systematic selection criteria.