 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Averse Planning and Plan Assessment for Marine Robots
Oct 01, 2024
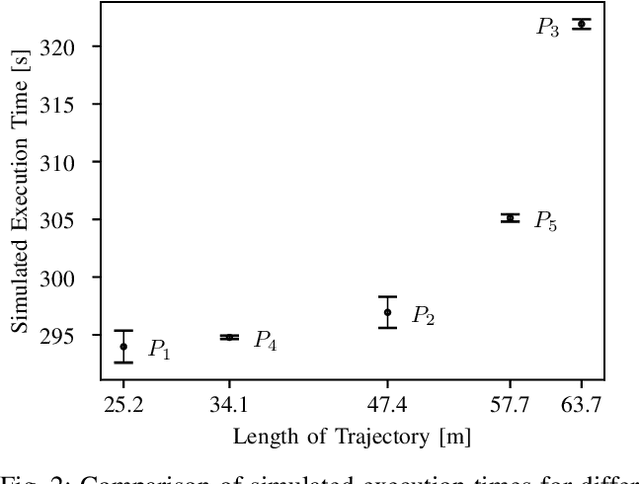
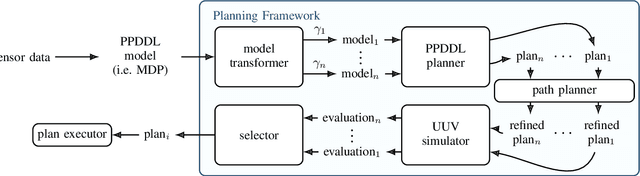
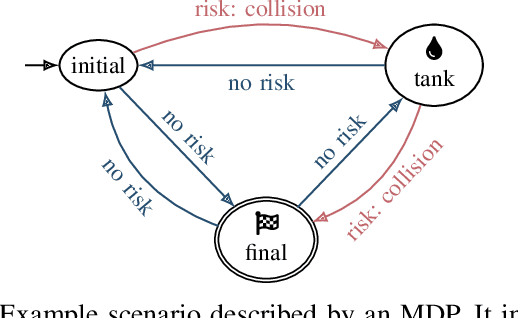
Autonomous Underwater Vehicles (AUVs) need to operate for days without human intervention and thus must be able to do efficient and reliable task planning. Unfortunately, efficient task planning requires deliberately abstract domain models (for scalability reasons), which in practice leads to plans that might be unreliable or under performing in practice. An optimal abstract plan may turn out suboptimal or unreliable during physical execution. To overcome this, we introduce a method that first generates a selection of diverse high-level plans and then assesses them in a low-level simulation to select the optimal and most reliable candidate. We evaluate the method using a realistic underwater robot simulation, estimating the risk metrics for different scenarios, demonstrating feasibility and effectiveness of the approach.
Planning with OWL-DL Ontologies (Extended Version)
Aug 14, 2024We introduce ontology-mediated planning, in which planning problems are combined with an ontology. Our formalism differs from existing ones in that we focus on a strong separation of the formalisms for describing planning problems and ontologies, which are only losely coupled by an interface. Moreover, we present a black-box algorithm that supports the full expressive power of OWL DL. This goes beyond what existing approaches combining automated planning with ontologies can do, which only support limited description logics such as DL-Lite and description logics that are Horn. Our main algorithm relies on rewritings of the ontology-mediated planning specifications into PDDL, so that existing planning systems can be used to solve them. The algorithm relies on justifications, which allows for a generic approach that is independent of the expressivity of the ontology language. However, dedicated optimizations for computing justifications need to be implemented to enable an efficient rewriting procedure. We evaluated our implementation on benchmark sets from several domains. The evaluation shows that our procedure works in practice and that tailoring the reasoning procedure has significant impact on the performance.
Towards Ontology-Mediated Planning with OWL DL Ontologies (Extended Version)
Aug 16, 2023While classical planning languages make the closed-domain and closed-world assumption, there have been various approaches to extend those with DL reasoning, which is then interpreted under the usual open-world semantics. Current approaches for planning with DL ontologies integrate the DL directly into the planning language, and practical approaches have been developed based on first-order rewritings or rewritings into datalog. We present here a new approach in which the planning specification and ontology are kept separate, and are linked together using an interface. This allows planning experts to work in a familiar formalism, while existing ontologies can be easily integrated and extended by ontology experts. Our approach for planning with those ontology-mediated planning problems is optimized for cases with comparatively small domains, and supports the whole OWL DL fragment. The idea is to rewrite the ontology-mediated planning problem into a classical planning problem to be processed by existing planning tools. Different to other approaches, our rewriting is data-dependent. A first experimental evaluation of our approach shows the potential and limitations of this approach.