 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsynchronous Multi-Object Tracking with an Event Camera
May 12, 2025Events cameras are ideal sensors for enabling robots to detect and track objects in highly dynamic environments due to their low latency output, high temporal resolution, and high dynamic range. In this paper, we present the Asynchronous Event Multi-Object Tracking (AEMOT) algorithm for detecting and tracking multiple objects by processing individual raw events asynchronously. AEMOT detects salient event blob features by identifying regions of consistent optical flow using a novel Field of Active Flow Directions built from the Surface of Active Events. Detected features are tracked as candidate objects using the recently proposed Asynchronous Event Blob (AEB) tracker in order to construct small intensity patches of each candidate object. A novel learnt validation stage promotes or discards candidate objects based on classification of their intensity patches, with promoted objects having their position, velocity, size, and orientation estimated at their event rate. We evaluate AEMOT on a new Bee Swarm Dataset, where it tracks dozens of small bees with precision and recall performance exceeding that of alternative event-based detection and tracking algorithms by over 37%. Source code and the labelled event Bee Swarm Dataset will be open sourced
Revisiting Implicit Differentiation for Learning Problems in Optimal Control
Oct 24, 2023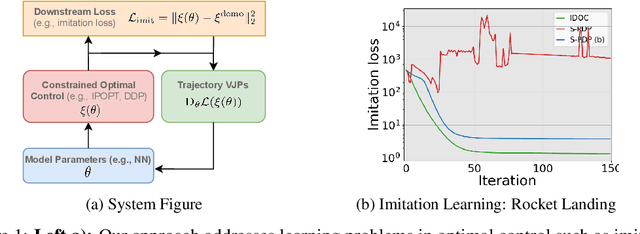
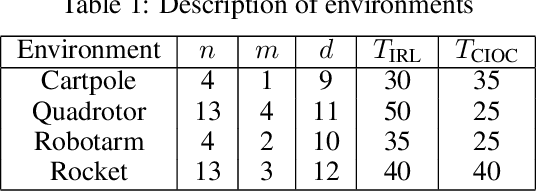
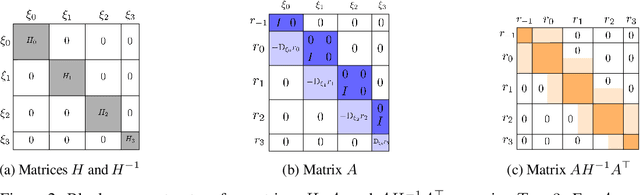
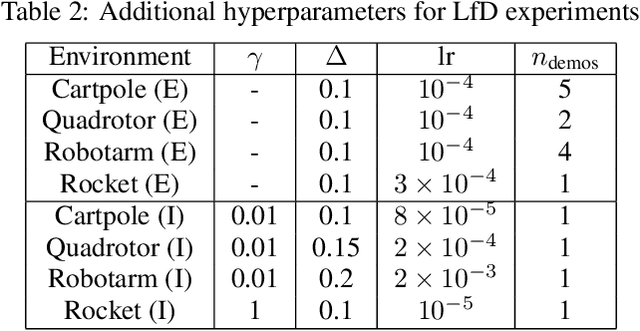
This paper proposes a new method for differentiating through optimal trajectories arising from non-convex, constrained discrete-time optimal control (COC) problems using the implicit function theorem (IFT). Previous works solve a differential Karush-Kuhn-Tucker (KKT) system for the trajectory derivative, and achieve this efficiently by solving an auxiliary Linear Quadratic Regulator (LQR) problem. In contrast, we directly evaluate the matrix equations which arise from applying variable elimination on the Lagrange multiplier terms in the (differential) KKT system. By appropriately accounting for the structure of the terms within the resulting equations, we show that the trajectory derivatives scale linearly with the number of timesteps. Furthermore, our approach allows for easy parallelization, significantly improved scalability with model size, direct computation of vector-Jacobian products and improved numerical stability compared to prior works. As an additional contribution, we unify prior works, addressing claims that computing trajectory derivatives using IFT scales quadratically with the number of timesteps. We evaluate our method on a both synthetic benchmark and four challenging, learning from demonstration benchmarks including a 6-DoF maneuvering quadrotor and 6-DoF rocket powered landing.
Event Blob Tracking: An Asynchronous Real-Time Algorithm
Jul 20, 2023Event-based cameras have become increasingly popular for tracking fast-moving objects due to their high temporal resolution, low latency, and high dynamic range. In this paper, we propose a novel algorithm for tracking event blobs using raw events asynchronously in real time. We introduce the concept of an event blob as a spatio-temporal likelihood of event occurrence where the conditional spatial likelihood is blob-like. Many real-world objects generate event blob data, for example, flickering LEDs such as car headlights or any small foreground object moving against a static or slowly varying background. The proposed algorithm uses a nearest neighbour classifier with a dynamic threshold criteria for data association coupled with a Kalman filter to track the event blob state. Our algorithm achieves highly accurate tracking and event blob shape estimation even under challenging lighting conditions and high-speed motions. The microsecond time resolution achieved means that the filter output can be used to derive secondary information such as time-to-contact or range estimation, that will enable applications to real-world problems such as collision avoidance in autonomous driving.