Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual SLAM-based Localization and Navigation for Service Robots: The Pepper Case
Nov 20, 2018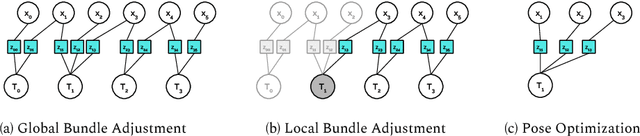
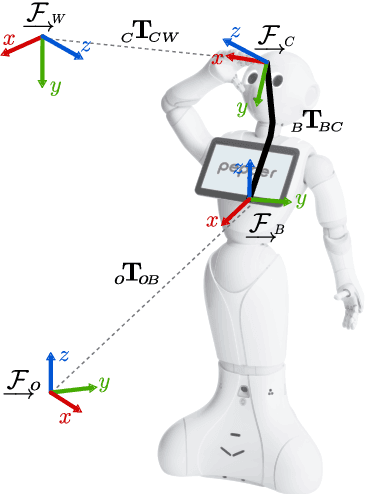
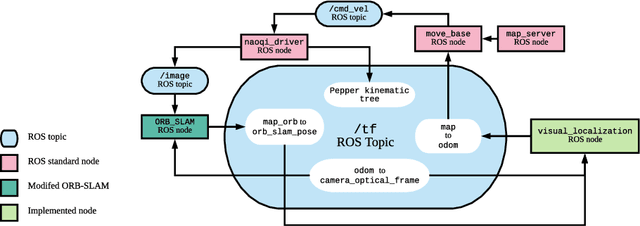

We propose a Visual-SLAM based localization and navigation system for service robots. Our system is built on top of the ORB-SLAM monocular system but extended by the inclusion of wheel odometry in the estimation procedures. As a case study, the proposed system is validated using the Pepper robot, whose short-range LIDARs and RGB-D camera do not allow the robot to self-localize in large environments. The localization system is tested in navigation tasks using Pepper in two different environments: a medium-size laboratory, and a large-size hall.
* 12 pages, 6 figures. Presented in RoboCup Symposium 2018. Final
version will appear in Springer
Via