 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring 3D Articulated Models for Box Packaging Robot
Jun 23, 2011
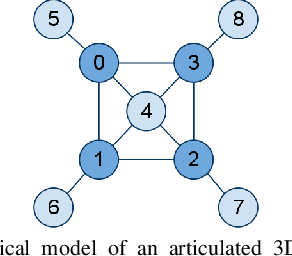
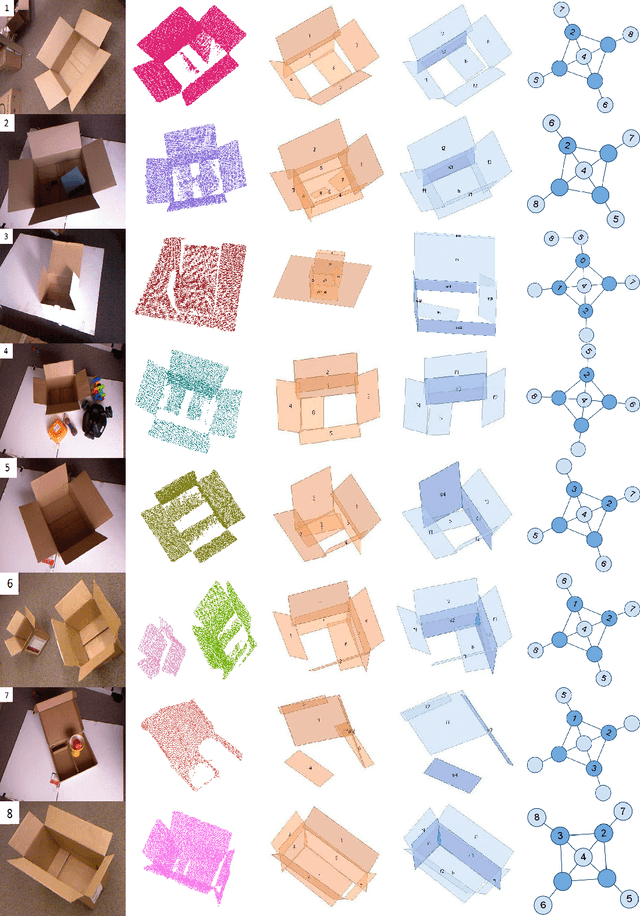

Given a point cloud, we consider inferring kinematic models of 3D articulated objects such as boxes for the purpose of manipulating them. While previous work has shown how to extract a planar kinematic model (often represented as a linear chain), such planar models do not apply to 3D objects that are composed of segments often linked to the other segments in cyclic configurations. We present an approach for building a model that captures the relation between the input point cloud features and the object segment as well as the relation between the neighboring object segments. We use a conditional random field that allows us to model the dependencies between different segments of the object. We test our approach on inferring the kinematic structure from partial and noisy point cloud data for a wide variety of boxes including cake boxes, pizza boxes, and cardboard cartons of several sizes. The inferred structure enables our robot to successfully close these boxes by manipulating the flaps.