 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Get Up
Apr 30, 2022
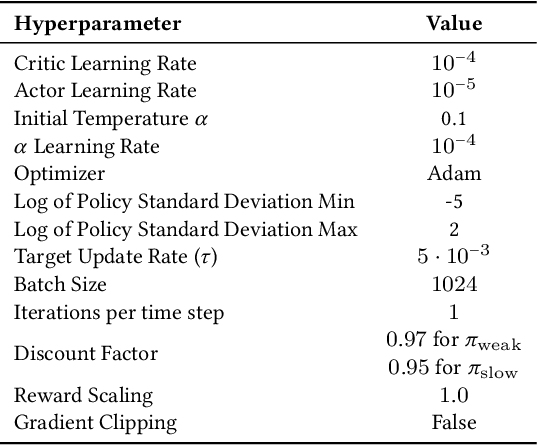
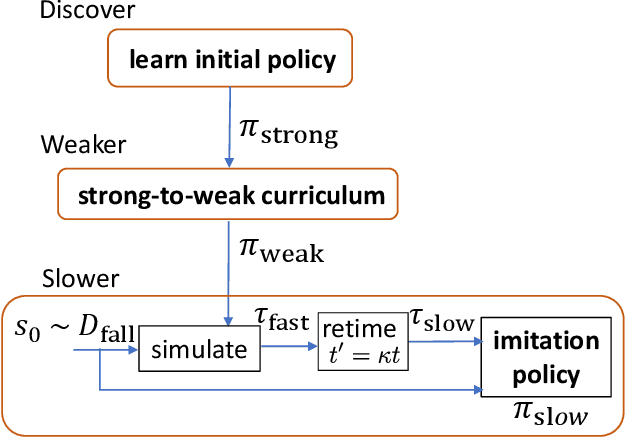
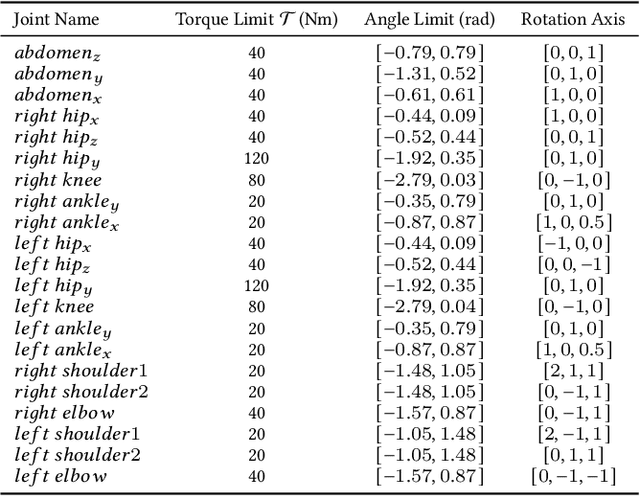
Getting up from an arbitrary fallen state is a basic human skill. Existing methods for learning this skill often generate highly dynamic and erratic get-up motions, which do not resemble human get-up strategies, or are based on tracking recorded human get-up motions. In this paper, we present a staged approach using reinforcement learning, without recourse to motion capture data. The method first takes advantage of a strong character model, which facilitates the discovery of solution modes. A second stage then learns to adapt the control policy to work with progressively weaker versions of the character. Finally, a third stage learns control policies that can reproduce the weaker get-up motions at much slower speeds. We show that across multiple runs, the method can discover a diverse variety of get-up strategies, and execute them at a variety of speeds. The results usually produce policies that use a final stand-up strategy that is common to the recovery motions seen from all initial states. However, we also find policies for which different strategies are seen for prone and supine initial fallen states. The learned get-up control strategies often have significant static stability, i.e., they can be paused at a variety of points during the get-up motion. We further test our method on novel constrained scenarios, such as having a leg and an arm in a cast.
Evaluating Vision Transformer Methods for Deep Reinforcement Learning from Pixels
Apr 11, 2022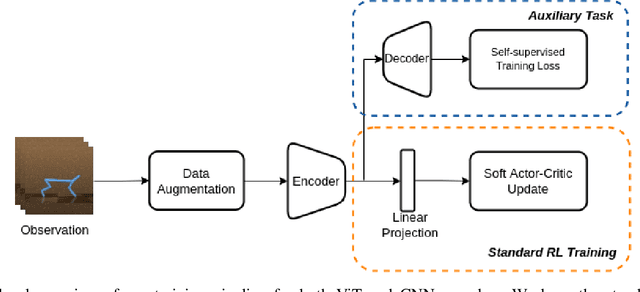
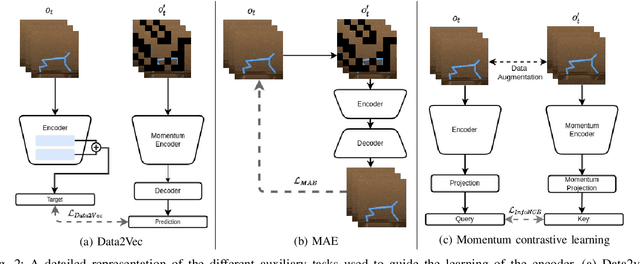
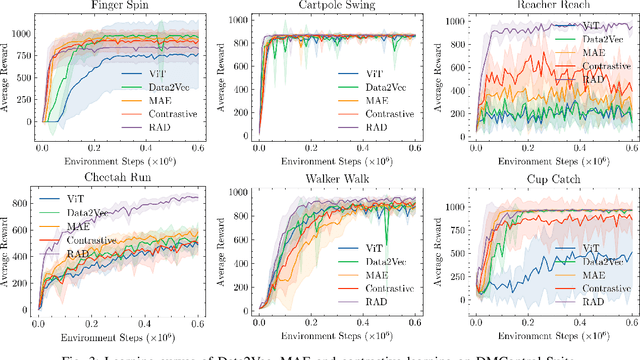
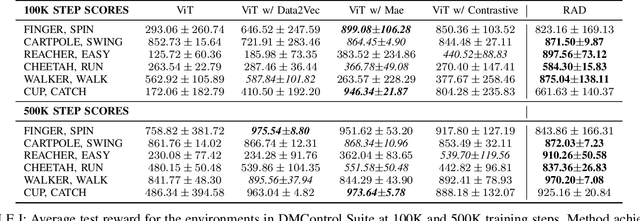
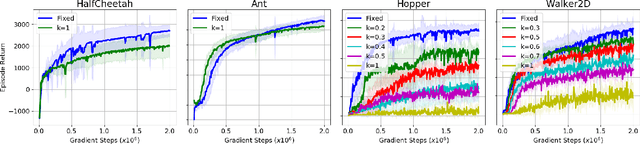
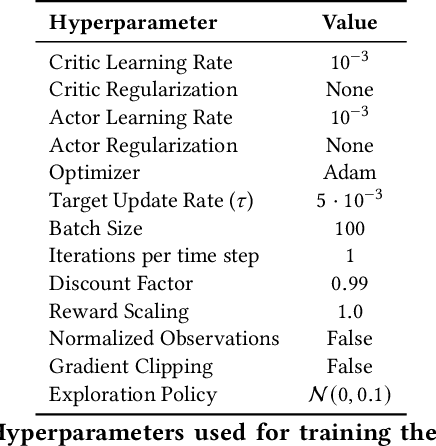
Vision Transformers (ViT) have recently demonstrated the significant potential of transformer architectures for computer vision. To what extent can image-based deep reinforcement learning also benefit from ViT architectures, as compared to standard convolutional neural network (CNN) architectures? To answer this question, we evaluate ViT training methods for image-based reinforcement learning (RL) control tasks and compare these results to a leading convolutional-network architecture method, RAD. For training the ViT encoder, we consider several recently-proposed self-supervised losses that are treated as auxiliary tasks, as well as a baseline with no additional loss terms. We find that the CNN architectures trained using RAD still generally provide superior performance. For the ViT methods, all three types of auxiliary tasks that we consider provide a benefit over plain ViT training. Furthermore, ViT masking-based tasks are found to significantly outperform ViT contrastive-learning.
Style-ERD: Responsive and Coherent Online Motion Style Transfer
Mar 29, 2022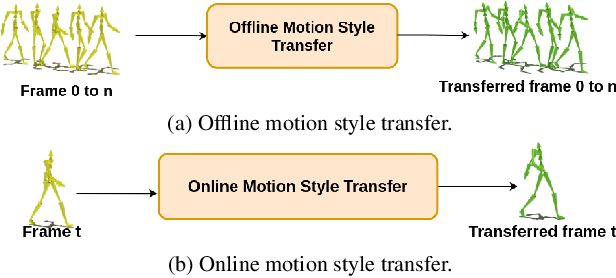
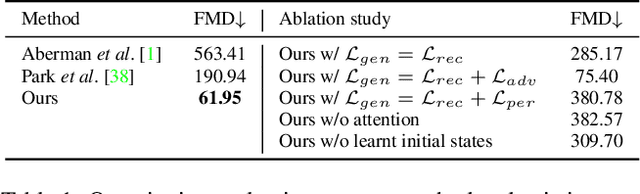
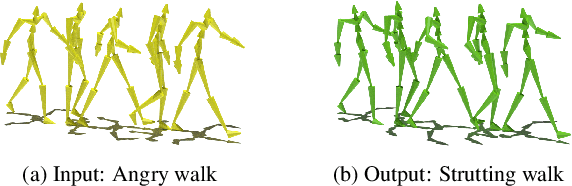
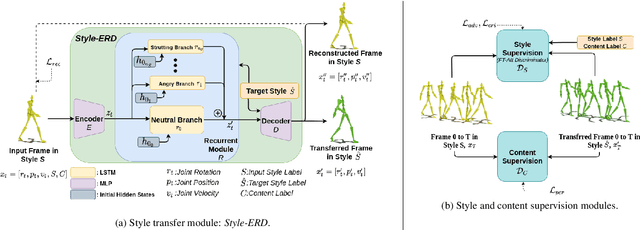
Motion style transfer is a common method for enriching character animation. Motion style transfer algorithms are often designed for offline settings where motions are processed in segments. However, for online animation applications, such as realtime avatar animation from motion capture, motions need to be processed as a stream with minimal latency. In this work, we realize a flexible, high-quality motion style transfer method for this setting. We propose a novel style transfer model, Style-ERD, to stylize motions in an online manner with an Encoder-Recurrent-Decoder structure, along with a novel discriminator that combines feature attention and temporal attention. Our method stylizes motions into multiple target styles with a unified model. Although our method targets online settings, it outperforms previous offline methods in motion realism and style expressiveness and provides significant gains in runtime efficiency
Learning to Locomote: Understanding How Environment Design Matters for Deep Reinforcement Learning
Oct 09, 2020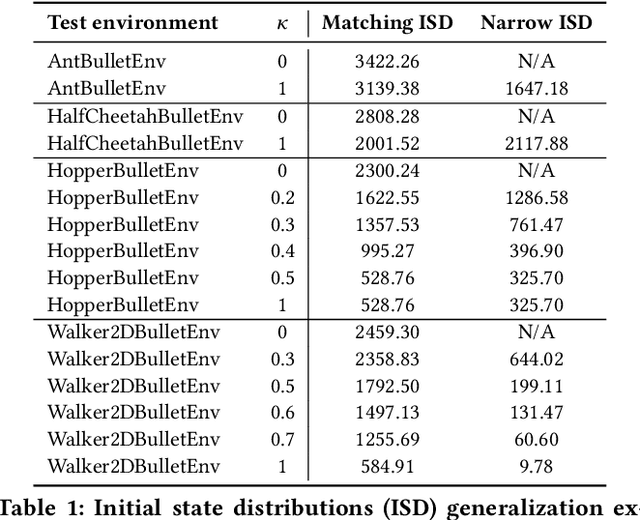

Learning to locomote is one of the most common tasks in physics-based animation and deep reinforcement learning (RL). A learned policy is the product of the problem to be solved, as embodied by the RL environment, and the RL algorithm. While enormous attention has been devoted to RL algorithms, much less is known about the impact of design choices for the RL environment. In this paper, we show that environment design matters in significant ways and document how it can contribute to the brittle nature of many RL results. Specifically, we examine choices related to state representations, initial state distributions, reward structure, control frequency, episode termination procedures, curriculum usage, the action space, and the torque limits. We aim to stimulate discussion around such choices, which in practice strongly impact the success of RL when applied to continuous-action control problems of interest to animation, such as learning to locomote.