 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelay Buffer Independent Communication over Pooled HBM for Efficient MoE Inference on Ascend
May 07, 2026Mixture-of-Experts (MoE) inference requires large-scale token exchange across devices, making dispatch and combine major bottlenecks in both prefill and decode. Beyond network transfer, routing-driven layout transformation, temporary relay, and output restoration can add substantial overhead. Existing MoE communication paths are often buffer-centric, using explicit inter-process relay and reordering buffers around collective transfer. This report presents a relay-buffer-free communication design for MoE inference acceleration on Ascend systems. The design reorganizes dispatch and combine around direct placement into destination expert windows and direct reading from remote expert windows. Built on globally pooled high-bandwidth memory and symmetric-memory allocation, it removes most intermediate relay and reordering buffers while retaining only lightweight control state, including counts, offsets, and synchronization metadata. We instantiate the design as two schedules for the main phases of MoE inference: a prefill schedule with richer planning state for throughput-oriented execution, and a compact decode schedule for latency-sensitive execution. Experiments on Ascend-based MoE workloads show reduced dispatch and combine latency in both settings. At the serving level, the implementation improves time to first token (TTFT), preserves competitive time per output token (TPOT), and enlarges the feasible scheduling space under practical latency constraints. These results indicate that, on platforms with globally addressable device memory, reducing intermediate buffering and output restoration around expert execution is an effective direction for accelerating MoE inference.
Fast and Scalable Network Slicing by Integrating Deep Learning with Lagrangian Methods
Jan 22, 2024


Network slicing is a key technique in 5G and beyond for efficiently supporting diverse services. Many network slicing solutions rely on deep learning to manage complex and high-dimensional resource allocation problems. However, deep learning models suffer limited generalization and adaptability to dynamic slicing configurations. In this paper, we propose a novel framework that integrates constrained optimization methods and deep learning models, resulting in strong generalization and superior approximation capability. Based on the proposed framework, we design a new neural-assisted algorithm to allocate radio resources to slices to maximize the network utility under inter-slice resource constraints. The algorithm exhibits high scalability, accommodating varying numbers of slices and slice configurations with ease. We implement the proposed solution in a system-level network simulator and evaluate its performance extensively by comparing it to state-of-the-art solutions including deep reinforcement learning approaches. The numerical results show that our solution obtains near-optimal quality-of-service satisfaction and promising generalization performance under different network slicing scenarios.
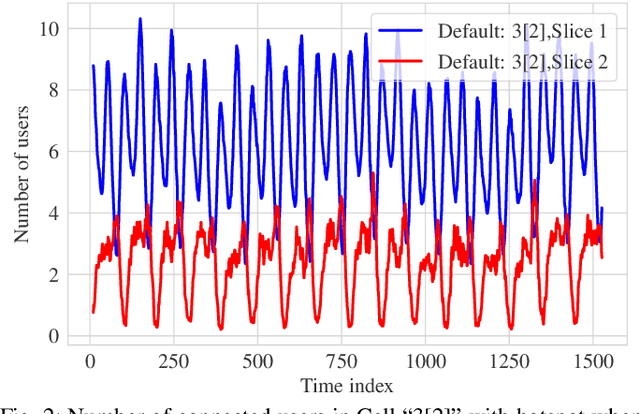
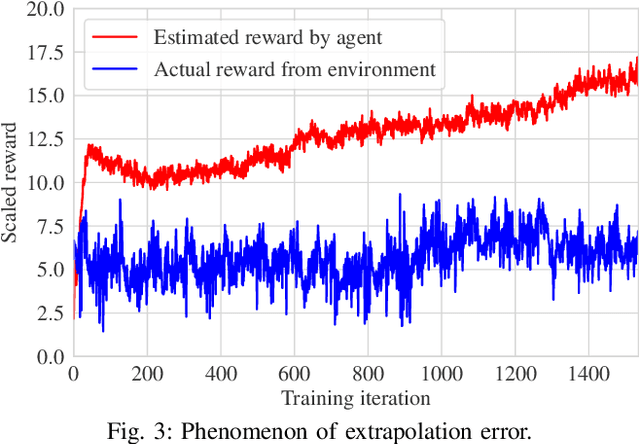
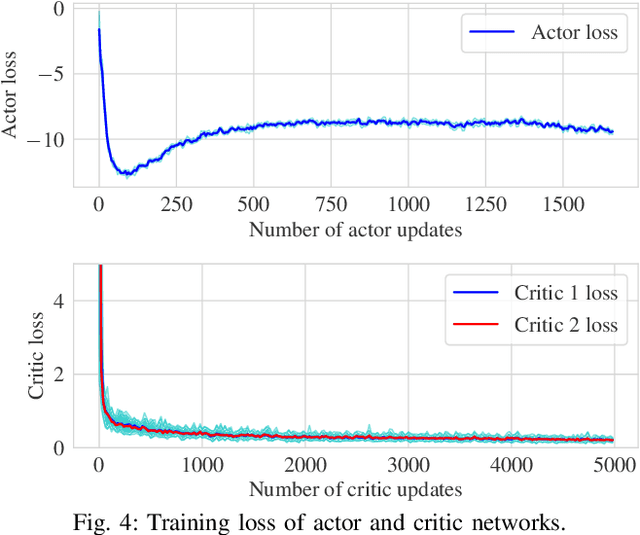
Inter-Cell Network Slicing With Transfer Learning Empowered Multi-Agent Deep Reinforcement Learning
Jun 20, 2023Network slicing enables operators to efficiently support diverse applications on a common physical infrastructure. The ever-increasing densification of network deployment leads to complex and non-trivial inter-cell interference, which requires more than inaccurate analytic models to dynamically optimize resource management for network slices. In this paper, we develop a DIRP algorithm with multiple deep reinforcement learning (DRL) agents to cooperatively optimize resource partition in individual cells to fulfill the requirements of each slice, based on two alternative reward functions. Nevertheless, existing DRL approaches usually tie the pretrained model parameters to specific network environments with poor transferability, which raises practical deployment concerns in large-scale mobile networks. Hence, we design a novel transfer learning-aided DIRP (TL-DIRP) algorithm to ease the transfer of DIRP agents across different network environments in terms of sample efficiency, model reproducibility, and algorithm scalability. The TL-DIRP algorithm first centrally trains a generalized model and then transfers the "generalist" to each local agent as "specialist" with distributed finetuning and execution. TL-DIRP consists of two steps: 1) centralized training of a generalized distributed model, 2) transferring the "generalist" to each "specialist" with distributed finetuning and execution. The numerical results show that not only DIRP outperforms existing baseline approaches in terms of faster convergence and higher reward, but more importantly, TL-DIRP significantly improves the service performance, with reduced exploration cost, accelerated convergence rate, and enhanced model reproducibility. As compared to a traffic-aware baseline, TL-DIRP provides about 15% less violation ratio of the quality of service (QoS) for the worst slice service and 8.8% less violation on the average service QoS.
* 14 pages, 14 figures, IEEE Open Journal of the Communications Society
Network Slicing via Transfer Learning aided Distributed Deep Reinforcement Learning
Jan 09, 2023Deep reinforcement learning (DRL) has been increasingly employed to handle the dynamic and complex resource management in network slicing. The deployment of DRL policies in real networks, however, is complicated by heterogeneous cell conditions. In this paper, we propose a novel transfer learning (TL) aided multi-agent deep reinforcement learning (MADRL) approach with inter-agent similarity analysis for inter-cell inter-slice resource partitioning. First, we design a coordinated MADRL method with information sharing to intelligently partition resource to slices and manage inter-cell interference. Second, we propose an integrated TL method to transfer the learned DRL policies among different local agents for accelerating the policy deployment. The method is composed of a new domain and task similarity measurement approach and a new knowledge transfer approach, which resolves the problem of from whom to transfer and how to transfer. We evaluated the proposed solution with extensive simulations in a system-level simulator and show that our approach outperforms the state-of-the-art solutions in terms of performance, convergence speed and sample efficiency. Moreover, by applying TL, we achieve an additional gain over 27% higher than the coordinate MADRL approach without TL.
Augmented Reality-Empowered Network Planning Services for Private Networks
Jun 24, 2022
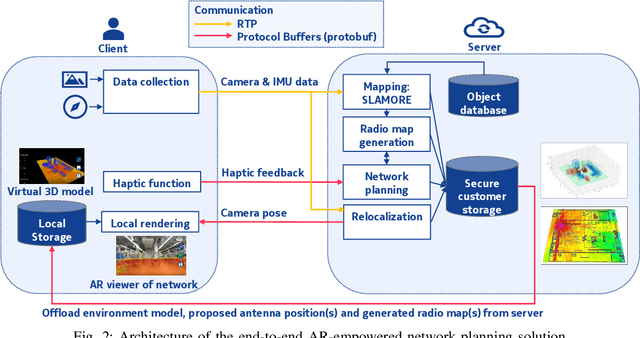
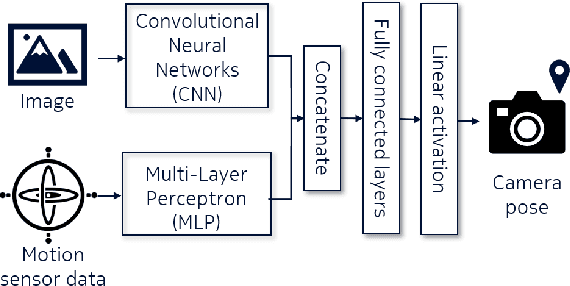
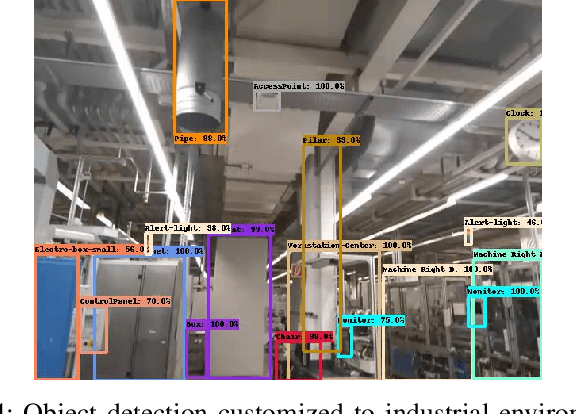
To support Industry 4.0 applications with haptics and human-machine interaction, the sixth generation (6G) requires a new framework that is fully autonomous, visual, and interactive. In this paper, we propose a novel framework for private network planning services, providing an end-to-end solution that receives visual and sensory data from the user device, reconstructs the 3D network environment and performs network planning on the server, and visualizes the network performance with augmented reality (AR) on the display of the user devices. The solution is empowered by three key technical components: 1) vision- and sensor fusion-based 3D environment reconstruction, 2) ray tracing-based radio map generation and network planning, and 3) AR-empowered network visualization enabled by real-time camera relocalization. We conducted the proof-of-concept in a Bosch plant in Germany and showed good network coverage of the optimized antenna location, as well as high accuracy in both environment reconstruction and camera relocalization. We also achieved real-time AR-supported network monitoring with an end-to-end latency of about 32 ms per frame.
Knowledge Transfer in Deep Reinforcement Learning for Slice-Aware Mobility Robustness Optimization
Mar 07, 2022
The legacy mobility robustness optimization (MRO) in self-organizing networks aims at improving handover performance by optimizing cell-specific handover parameters. However, such solutions cannot satisfy the needs of next-generation network with network slicing, because it only guarantees the received signal strength but not the per-slice service quality. To provide the truly seamless mobility service, we propose a deep reinforcement learning-based slice-aware mobility robustness optimization (SAMRO) approach, which improves handover performance with per-slice service assurance by optimizing slice-specific handover parameters. Moreover, to allow safe and sample efficient online training, we develop a two-step transfer learning scheme: 1) regularized offline reinforcement learning, and 2) effective online fine-tuning with mixed experience replay. System-level simulations show that compared against the legacy MRO algorithms, SAMRO significantly improves slice-aware service continuation while optimizing the handover performance.