 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPARC: Soft Probabilistic Adaptive multi-interest Retrieval Model via Codebooks for recommender system
Aug 12, 2025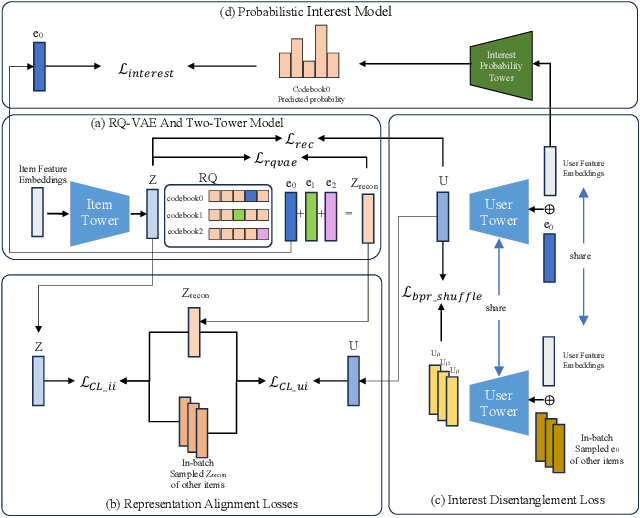



Modeling multi-interests has arisen as a core problem in real-world RS. Current multi-interest retrieval methods pose three major challenges: 1) Interests, typically extracted from predefined external knowledge, are invariant. Failed to dynamically evolve with users' real-time consumption preferences. 2) Online inference typically employs an over-exploited strategy, mainly matching users' existing interests, lacking proactive exploration and discovery of novel and long-tail interests. To address these challenges, we propose a novel retrieval framework named SPARC(Soft Probabilistic Adaptive Retrieval Model via Codebooks). Our contribution is two folds. First, the framework utilizes Residual Quantized Variational Autoencoder (RQ-VAE) to construct a discretized interest space. It achieves joint training of the RQ-VAE with the industrial large scale recommendation model, mining behavior-aware interests that can perceive user feedback and evolve dynamically. Secondly, a probabilistic interest module that predicts the probability distribution over the entire dynamic and discrete interest space. This facilitates an efficient "soft-search" strategy during online inference, revolutionizing the retrieval paradigm from "passive matching" to "proactive exploration" and thereby effectively promoting interest discovery. Online A/B tests on an industrial platform with tens of millions daily active users, have achieved substantial gains in business metrics: +0.9% increase in user view duration, +0.4% increase in user page views (PV), and a +22.7% improvement in PV500(new content reaching 500 PVs in 24 hours). Offline evaluations are conducted on open-source Amazon Product datasets. Metrics, such as Recall@K and Normalized Discounted Cumulative Gain@K(NDCG@K), also showed consistent improvement. Both online and offline experiments validate the efficacy and practical value of the proposed method.
Enhancing Serendipity Recommendation System by Constructing Dynamic User Knowledge Graphs with Large Language Models
Aug 06, 2025



The feedback loop in industrial recommendation systems reinforces homogeneous content, creates filter bubble effects, and diminishes user satisfaction. Recently, large language models(LLMs) have demonstrated potential in serendipity recommendation, thanks to their extensive world knowledge and superior reasoning capabilities. However, these models still face challenges in ensuring the rationality of the reasoning process, the usefulness of the reasoning results, and meeting the latency requirements of industrial recommendation systems (RSs). To address these challenges, we propose a method that leverages llm to dynamically construct user knowledge graphs, thereby enhancing the serendipity of recommendation systems. This method comprises a two stage framework:(1) two-hop interest reasoning, where user static profiles and historical behaviors are utilized to dynamically construct user knowledge graphs via llm. Two-hop reasoning, which can enhance the quality and accuracy of LLM reasoning results, is then performed on the constructed graphs to identify users' potential interests; and(2) Near-line adaptation, a cost-effective approach to deploying the aforementioned models in industrial recommendation systems. We propose a u2i (user-to-item) retrieval model that also incorporates i2i (item-to-item) retrieval capabilities, the retrieved items not only exhibit strong relevance to users' newly emerged interests but also retain the high conversion rate of traditional u2i retrieval. Our online experiments on the Dewu app, which has tens of millions of users, indicate that the method increased the exposure novelty rate by 4.62%, the click novelty rate by 4.85%, the average view duration per person by 0.15%, unique visitor click through rate by 0.07%, and unique visitor interaction penetration by 0.30%, enhancing user experience.
Industrial Internet Robot Collaboration System and Edge Computing Optimization
Apr 03, 2025In a complex environment, for a mobile robot to safely and collision - free avoid all obstacles, it poses high requirements for its intelligence level. Given that the information such as the position and geometric characteristics of obstacles is random, the control parameters of the robot, such as velocity and angular velocity, are also prone to random deviations. To address this issue in the framework of the Industrial Internet Robot Collaboration System, this paper proposes a global path control scheme for mobile robots based on deep learning. First of all, the dynamic equation of the mobile robot is established. According to the linear velocity and angular velocity of the mobile robot, its motion behaviors are divided into obstacle - avoidance behavior, target - turning behavior, and target approaching behavior. Subsequently, the neural network method in deep learning is used to build a global path planning model for the robot. On this basis, a fuzzy controller is designed with the help of a fuzzy control algorithm to correct the deviations that occur during path planning, thereby achieving optimized control of the robot's global path. In addition, considering edge computing optimization, the proposed model can process local data at the edge device, reducing the communication burden between the robot and the central server, and improving the real time performance of path planning. The experimental results show that for the mobile robot controlled by the research method in this paper, the deviation distance of the path angle is within 5 cm, the deviation convergence can be completed within 10 ms, and the planned path is shorter. This indicates that the proposed scheme can effectively improve the global path planning ability of mobile robots in the industrial Internet environment and promote the collaborative operation of robots through edge computing optimization.
Research and Design on Intelligent Recognition of Unordered Targets for Robots Based on Reinforcement Learning
Mar 10, 2025In the field of robot target recognition research driven by artificial intelligence (AI), factors such as the disordered distribution of targets, the complexity of the environment, the massive scale of data, and noise interference have significantly restricted the improvement of target recognition accuracy. Against the backdrop of the continuous iteration and upgrading of current AI technologies, to meet the demand for accurate recognition of disordered targets by intelligent robots in complex and changeable scenarios, this study innovatively proposes an AI - based intelligent robot disordered target recognition method using reinforcement learning. This method processes the collected target images with the bilateral filtering algorithm, decomposing them into low - illumination images and reflection images. Subsequently, it adopts differentiated AI strategies, compressing the illumination images and enhancing the reflection images respectively, and then fuses the two parts of images to generate a new image. On this basis, this study deeply integrates deep learning, a core AI technology, with the reinforcement learning algorithm. The enhanced target images are input into a deep reinforcement learning model for training, ultimately enabling the AI - based intelligent robot to efficiently recognize disordered targets. Experimental results show that the proposed method can not only significantly improve the quality of target images but also enable the AI - based intelligent robot to complete the recognition task of disordered targets with higher efficiency and accuracy, demonstrating extremely high application value and broad development prospects in the field of AI robots.