 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFC Portugal 3D Simulation Team: Team Description Paper 2020
Mar 28, 2023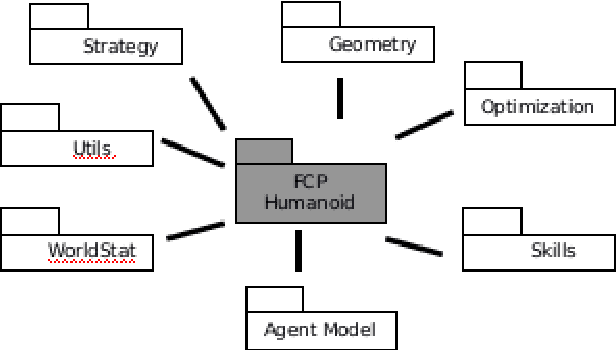



The FC Portugal 3D team is developed upon the structure of our previous Simulation league 2D/3D teams and our standard platform league team. Our research concerning the robot low-level skills is focused on developing behaviors that may be applied on real robots with minimal adaptation using model-based approaches. Our research on high-level soccer coordination methodologies and team playing is mainly focused on the adaptation of previously developed methodologies from our 2D soccer teams to the 3D humanoid environment and on creating new coordination methodologies based on the previously developed ones. The research-oriented development of our team has been pushing it to be one of the most competitive over the years (World champion in 2000 and Coach Champion in 2002, European champion in 2000 and 2001, Coach 2nd place in 2003 and 2004, European champion in Rescue Simulation and Simulation 3D in 2006, World Champion in Simulation 3D in Bremen 2006 and European champion in 2007, 2012, 2013, 2014 and 2015). This paper describes some of the main innovations of our 3D simulation league team during the last years. A new generic framework for reinforcement learning tasks has also been developed. The current research is focused on improving the above-mentioned framework by developing new learning algorithms to optimize low-level skills, such as running and sprinting. We are also trying to increase student contact by providing reinforcement learning assignments to be completed using our new framework, which exposes a simple interface without sharing low-level implementation details.
SPPAM - Statistical PreProcessing AlgorithM
Mar 11, 2011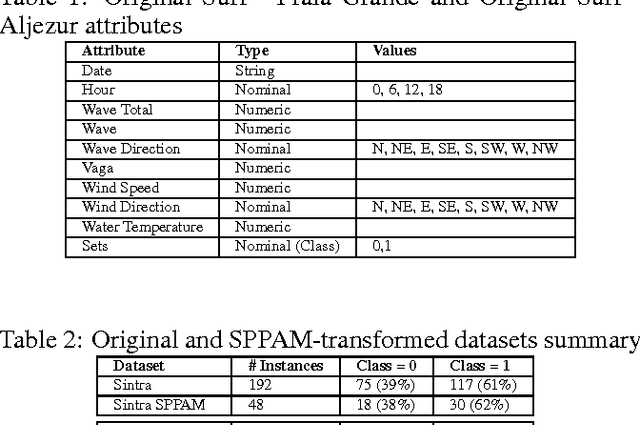
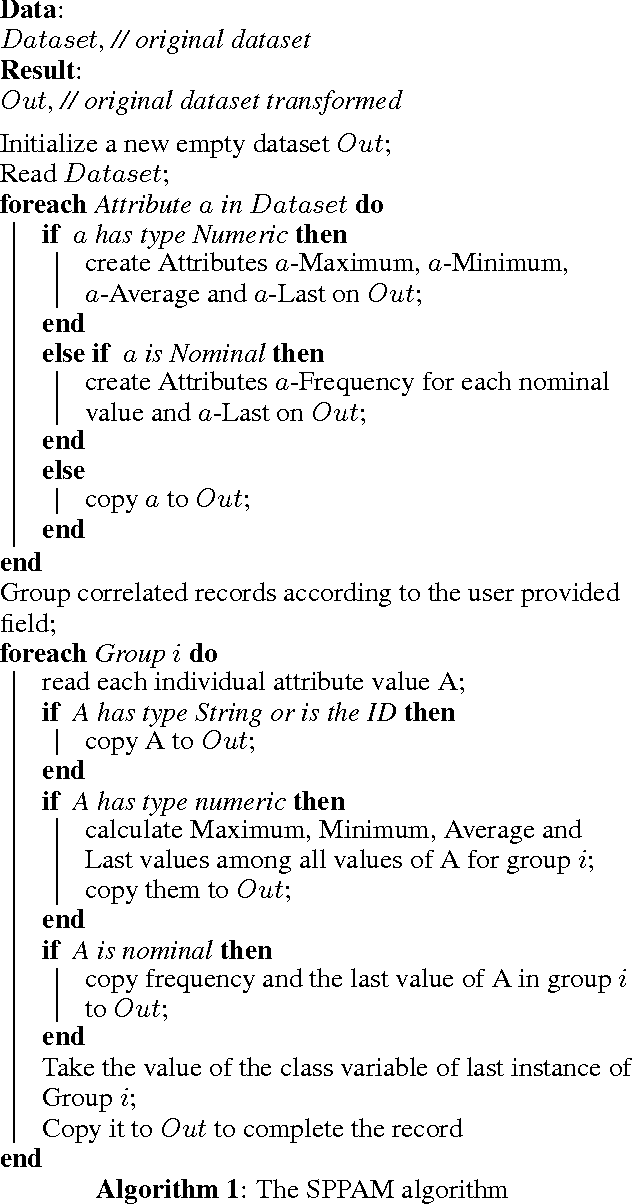
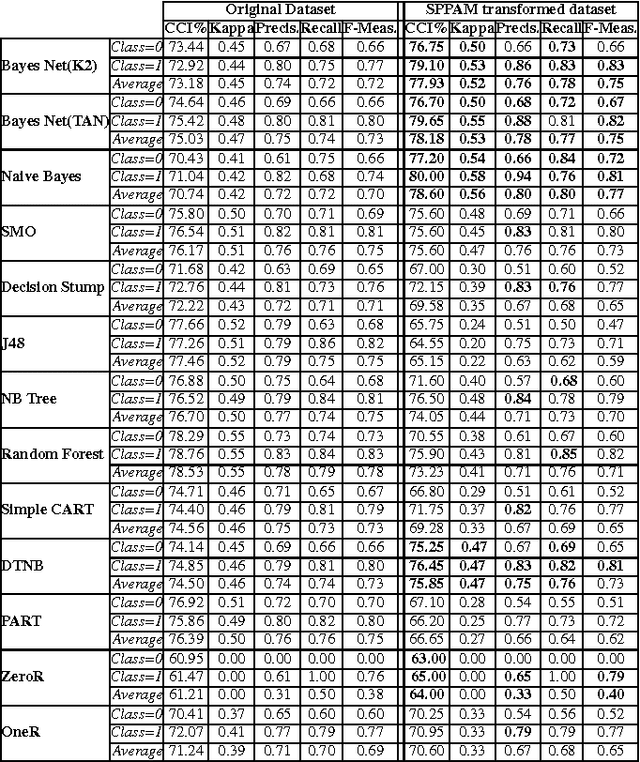
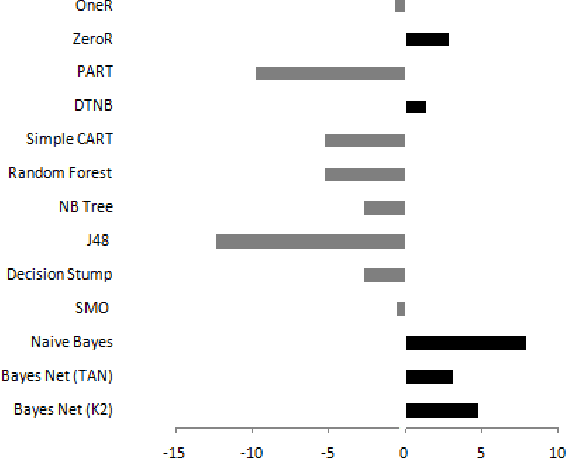
Most machine learning tools work with a single table where each row is an instance and each column is an attribute. Each cell of the table contains an attribute value for an instance. This representation prevents one important form of learning, which is, classification based on groups of correlated records, such as multiple exams of a single patient, internet customer preferences, weather forecast or prediction of sea conditions for a given day. To some extent, relational learning methods, such as inductive logic programming, can capture this correlation through the use of intensional predicates added to the background knowledge. In this work, we propose SPPAM, an algorithm that aggregates past observations in one single record. We show that applying SPPAM to the original correlated data, before the learning task, can produce classifiers that are better than the ones trained using all records.