 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Transformations in Probabilistic Circuits
Oct 06, 2023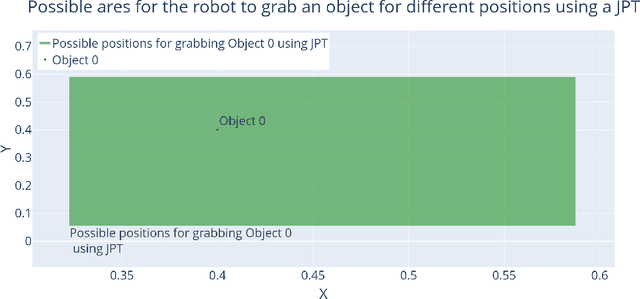
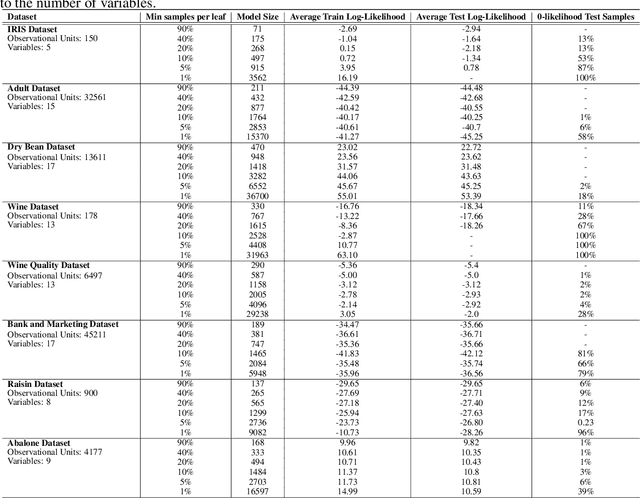
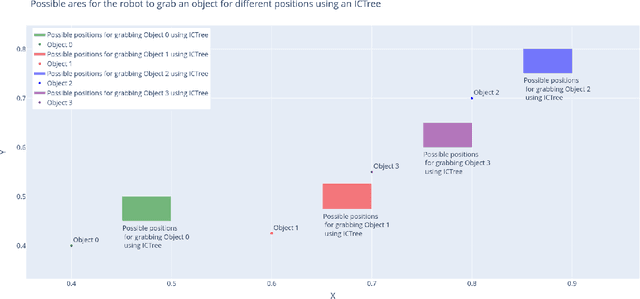
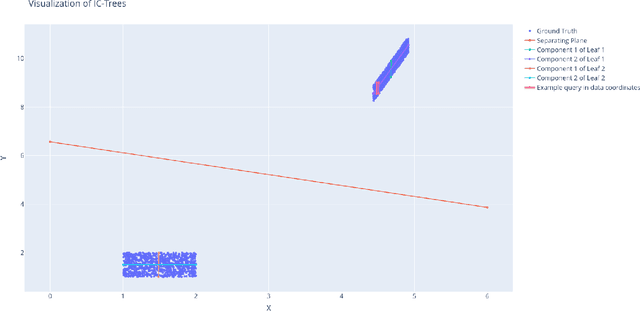
This study addresses the predictive limitation of probabilistic circuits and introduces transformations as a remedy to overcome it. We demonstrate this limitation in robotic scenarios. We motivate that independent component analysis is a sound tool to preserve the independence properties of probabilistic circuits. Our approach is an extension of joint probability trees, which are model-free deterministic circuits. By doing so, it is demonstrated that the proposed approach is able to achieve higher likelihoods while using fewer parameters compared to the joint probability trees on seven benchmark data sets as well as on real robot data. Furthermore, we discuss how to integrate transformations into tree-based learning routines. Finally, we argue that exact inference with transformed quantile parameterized distributions is not tractable. However, our approach allows for efficient sampling and approximate inference.