 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal Deep Learning Models for Tip Force Estimation During Needle Insertion
May 22, 2019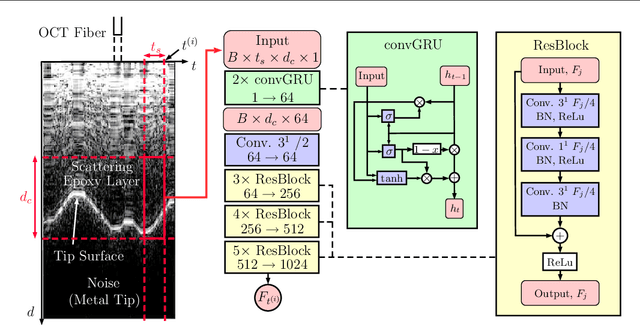
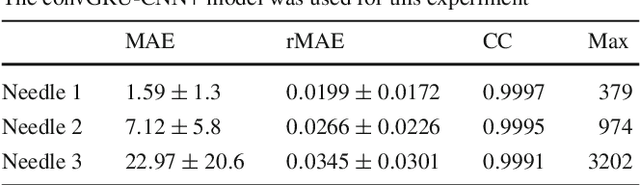
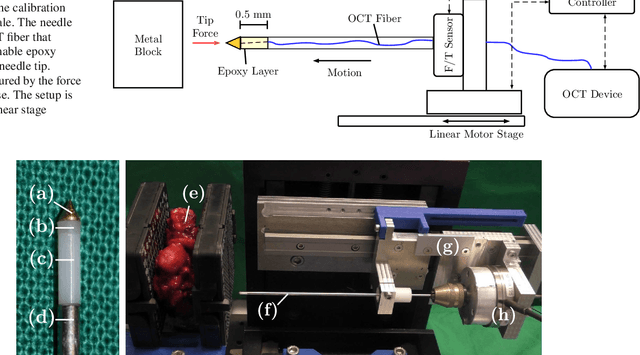
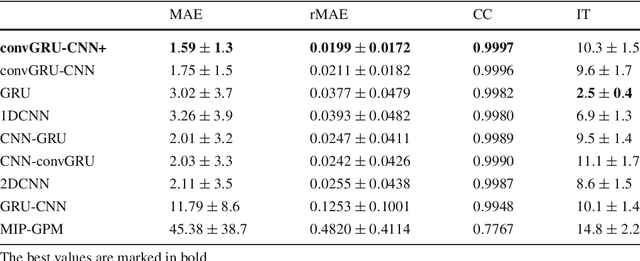
Purpose. Precise placement of needles is a challenge in a number of clinical applications such as brachytherapy or biopsy. Forces acting at the needle cause tissue deformation and needle deflection which in turn may lead to misplacement or injury. Hence, a number of approaches to estimate the forces at the needle have been proposed. Yet, integrating sensors into the needle tip is challenging and a careful calibration is required to obtain good force estimates. Methods. We describe a fiber-optical needle tip force sensor design using a single OCT fiber for measurement. The fiber images the deformation of an epoxy layer placed below the needle tip which results in a stream of 1D depth profiles. We study different deep learning approaches to facilitate calibration between this spatio-temporal image data and the related forces. In particular, we propose a novel convGRU-CNN architecture for simultaneous spatial and temporal data processing. Results. The needle can be adapted to different operating ranges by changing the stiffness of the epoxy layer. Likewise, calibration can be adapted by training the deep learning models. Our novel convGRU-CNN architecture results in the lowest mean absolute error of 1.59 +- 1.3 mN and a cross-correlation coefficient of 0.9997, and clearly outperforms the other methods. Ex vivo experiments in human prostate tissue demonstrate the needle's application. Conclusions. Our OCT-based fiber-optical sensor presents a viable alternative for needle tip force estimation. The results indicate that the rich spatio-temporal information included in the stream of images showing the deformation throughout the epoxy layer can be effectively used by deep learning models. Particularly, we demonstrate that the convGRU-CNN architecture performs favorably, making it a promising approach for other spatio-temporal learning problems.
Needle Tip Force Estimation using an OCT Fiber and a Fused convGRU-CNN Architecture
May 30, 2018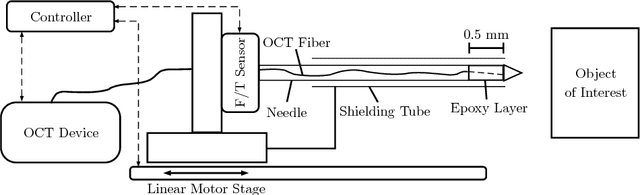

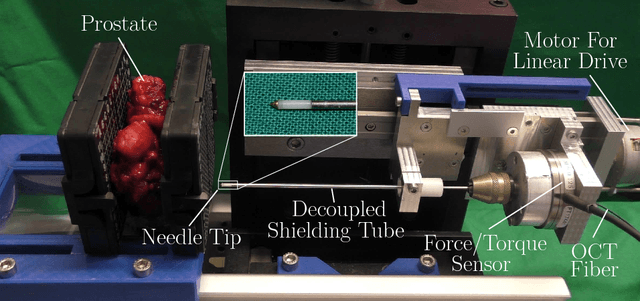
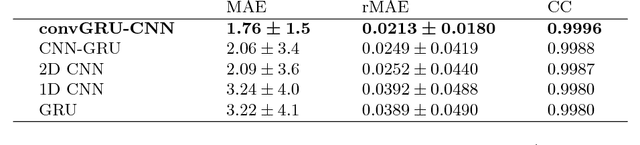
Needle insertion is common during minimally invasive interventions such as biopsy or brachytherapy. During soft tissue needle insertion, forces acting at the needle tip cause tissue deformation and needle deflection. Accurate needle tip force measurement provides information on needle-tissue interaction and helps detecting and compensating potential misplacement. For this purpose we introduce an image-based needle tip force estimation method using an optical fiber imaging the deformation of an epoxy layer below the needle tip over time. For calibration and force estimation, we introduce a novel deep learning-based fused convolutional GRU-CNN model which effectively exploits the spatio-temporal data structure. The needle is easy to manufacture and our model achieves a mean absolute error of 1.76 +- 1.5 mN with a cross-correlation coefficient of 0.9996, clearly outperforming other methods. We test needles with different materials to demonstrate that the approach can be adapted for different sensitivities and force ranges. Furthermore, we validate our approach in an ex-vivo prostate needle insertion scenario.
Design and implementation of a wireless instrument adapter
Apr 17, 2018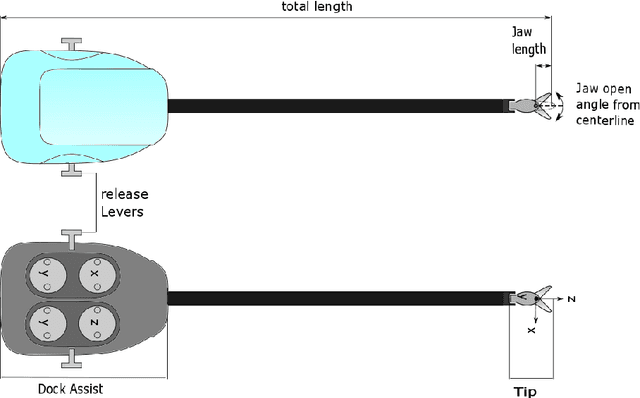
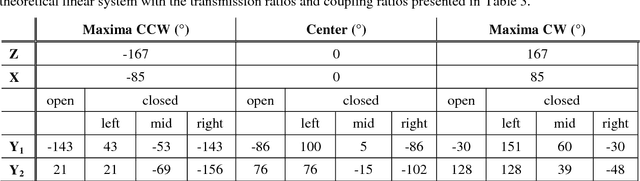
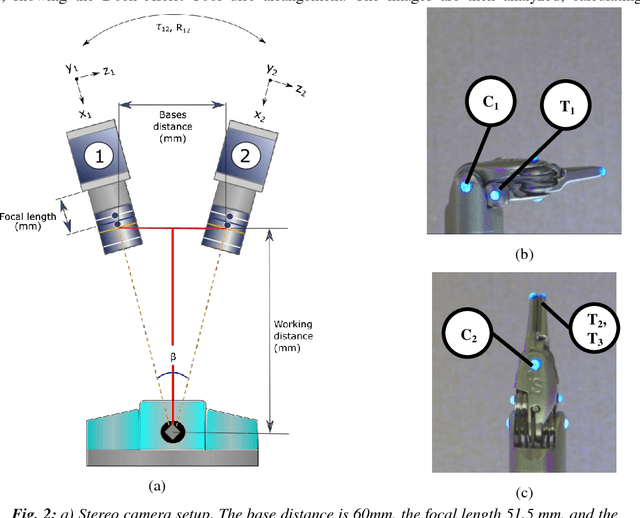
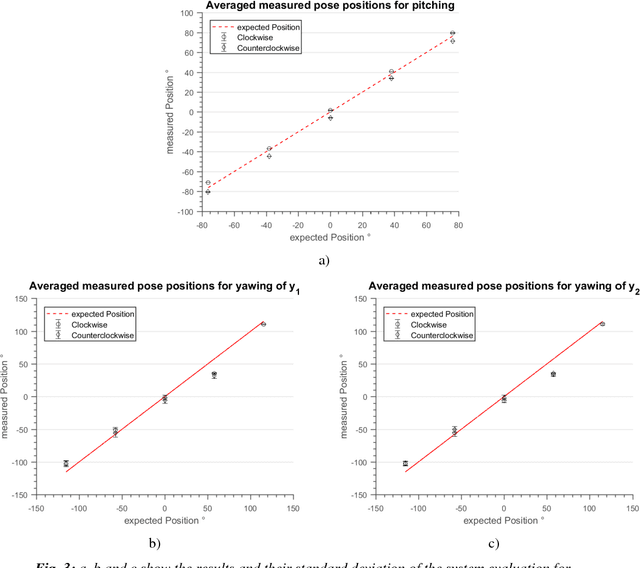
The evaluation of new methods for control and manipulation in minimally invasive robotic surgery requires a realistic setup. To decouple the evaluation of methods from overall clinical systems, we propose an instrument adapter for the S line EndoWrist\c{opyright} instruments of the da Vinci surgical system. The adapter is small and lightweight and can be mounted to any robot to mimic motion. We describe its design and implementation, as well as a setup to calibrate instruments to study precise motion control. Our results indicate that each instrument requires individual calibration. The calibration shows that the system is not fully linear. The repeatability of poses in the same sense of rotation has an RMSE of 0.27{\deg}/ and a standard deviation below 0.3{\deg} for pitching and 4.7{\deg} for yawing averaged over three measurements. When comparing the same poses in clockwise and counter-clockwise direction the RMSE is 12.8{\deg} and 5.7{\deg} for pitching and yawing, respectively. This is likely due to motor hysteresis.