 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Emotion Recognition with Spatiotemporal Convolutional Neural Networks
Nov 18, 2020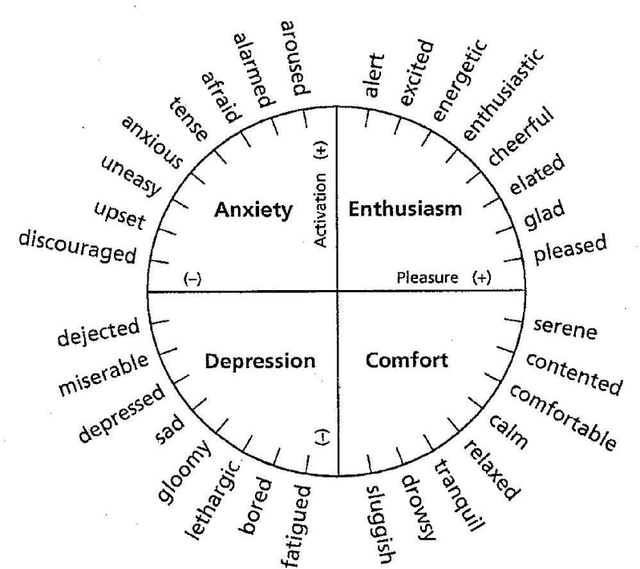
The attention in affect computing and emotion recognition has increased in the last decade. Facial expressions are one of the most powerful ways for depicting specific patterns in human behavior and describing human emotional state. Nevertheless, even for humans, identifying facial expressions is difficult, and automatic video-based systems for facial expression recognition (FER) have often suffered from variations in expressions among individuals, and from a lack of diverse and cross-culture training datasets. However, with video sequences captured in-the-wild and more complex emotion representation such as dimensional models, deep FER systems have the ability to learn more discriminative feature representations. In this paper, we present a survey of the state-of-the-art approaches based on convolutional neural networks (CNNs) for long video sequences recorded with in-the-wild settings, by considering the continuous emotion space of valence and arousal. Since few studies have used 3D-CNN for FER systems and dimensional representation of emotions, we propose an inflated 3D-CNN architecture, allowing for weight inflation of pre-trained 2D-CNN model, in order to operate the essential transfer learning for our video-based application. As a baseline, we also considered a 2D-CNN architecture cascaded network with a long short term memory network, therefore we could finally conclude with a model comparison over two approaches for spatiotemporal representation of facial features and performing the regression of valence/arousal values for emotion prediction. The experimental results on RAF-DB and SEWA-DB datasets have shown that these fine-tuned architectures allow to effectively encode the spatiotemporal information from raw pixel images, and achieved far better results than the current state-of-the-art.
Map Memorization and Forgetting in the IARA Autonomous Car
Oct 04, 2018
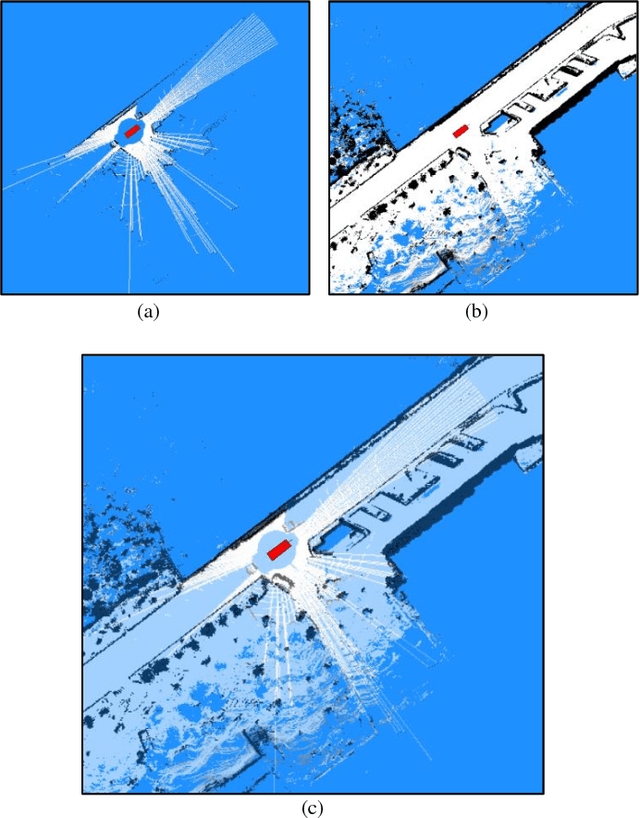
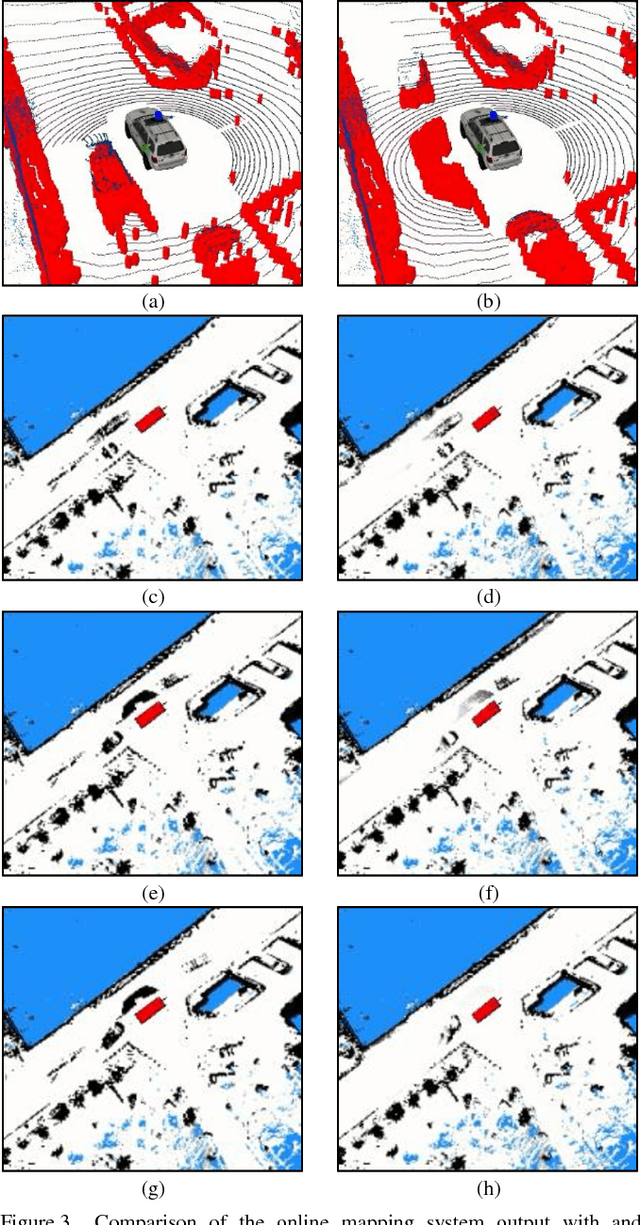
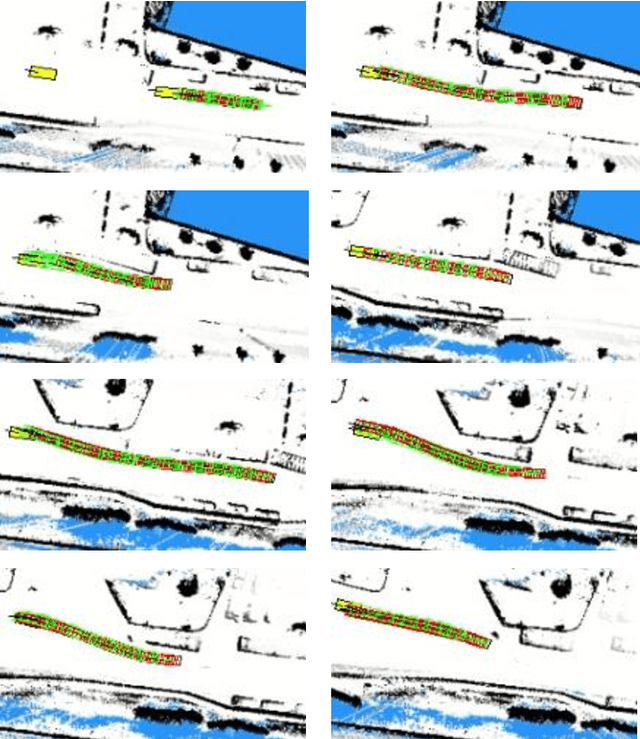
In this work, we present a novel strategy for correcting imperfections in occupancy grid maps called map decay. The objective of map decay is to correct invalid occupancy probabilities of map cells that are unobservable by sensors. The strategy was inspired by an analogy between the memory architecture believed to exist in the human brain and the maps maintained by an autonomous vehicle. It consists in merging sensory information obtained during runtime (online) with a priori data from a high-precision map constructed offline. In map decay, cells observed by sensors are updated using traditional occupancy grid mapping techniques and unobserved cells are adjusted so that their occupancy probabilities tend to the values found in the offline map. This strategy is grounded in the idea that the most precise information available about an unobservable cell is the value found in the high-precision offline map. Map decay was successfully tested and is still in use in the IARA autonomous vehicle from Universidade Federal do Esp\'irito Santo.
A Model-Predictive Motion Planner for the IARA Autonomous Car
Nov 09, 2017
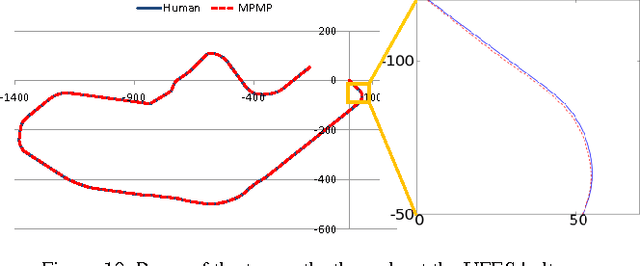

We present the Model-Predictive Motion Planner (MPMP) of the Intelligent Autonomous Robotic Automobile (IARA). IARA is a fully autonomous car that uses a path planner to compute a path from its current position to the desired destination. Using this path, the current position, a goal in the path and a map, IARA's MPMP is able to compute smooth trajectories from its current position to the goal in less than 50 ms. MPMP computes the poses of these trajectories so that they follow the path closely and, at the same time, are at a safe distance of eventual obstacles. Our experiments have shown that MPMP is able to compute trajectories that precisely follow a path produced by a Human driver (distance of 0.15 m in average) while smoothly driving IARA at speeds of up to 32.4 km/h (9 m/s).
* This is a preprint. Accepted by 2017 IEEE International Conference on Robotics and Automation (ICRA)