 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReproducible Evaluation of Pan-Tilt-Zoom Tracking
May 18, 2015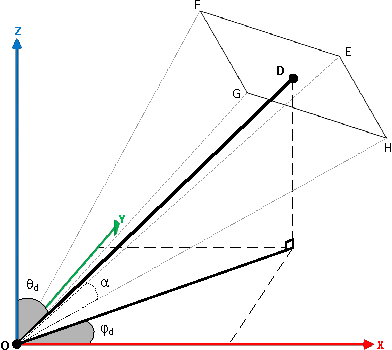

Tracking with a Pan-Tilt-Zoom (PTZ) camera has been a research topic in computer vision for many years. However, it is very difficult to assess the progress that has been made on this topic because there is no standard evaluation methodology. The difficulty in evaluating PTZ tracking algorithms arises from their dynamic nature. In contrast to other forms of tracking, PTZ tracking involves both locating the target in the image and controlling the motors of the camera to aim it so that the target stays in its field of view. This type of tracking can only be performed online. In this paper, we propose a new evaluation framework based on a virtual PTZ camera. With this framework, tracking scenarios do not change for each experiment and we are able to replicate online PTZ camera control and behavior including camera positioning delays, tracker processing delays, and numerical zoom. We tested our evaluation framework with the Camshift tracker to show its viability and to establish baseline results.