 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynchronization and Localization in Ad-Hoc ICAS Networks Using a Two-Stage Kuramoto Method
Jan 26, 2026To enable Integrated Communications and Sensing (ICAS) in a peer-to-peer vehicular network, precise synchronization in frequency and phase among the communicating entities is required. In addition, self-driving cars need accurate position estimates of the surrounding vehicles. In this work, we propose a joint, distributed synchronization and localization scheme for a network of communicating entities. Our proposed scheme is mostly signal-agnostic and therefore can be applied to a wide range of possible ICAS signals. We also mitigate the effect of finite sampling frequencies, which otherwise would degrade the synchronization and localization performance severely.
Generative Adversarial Synthesis of Radar Point Cloud Scenes
Oct 17, 2024



For the validation and verification of automotive radars, datasets of realistic traffic scenarios are required, which, how ever, are laborious to acquire. In this paper, we introduce radar scene synthesis using GANs as an alternative to the real dataset acquisition and simulation-based approaches. We train a PointNet++ based GAN model to generate realistic radar point cloud scenes and use a binary classifier to evaluate the performance of scenes generated using this model against a test set of real scenes. We demonstrate that our GAN model achieves similar performance (~87%) to the real scenes test set.
An Extended Kuramoto Model for Frequency and Phase Synchronization in Delay-Free Networks with Finite Number of Agents
Mar 20, 2024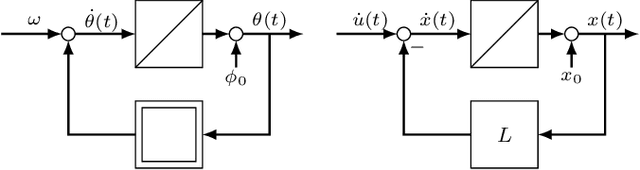
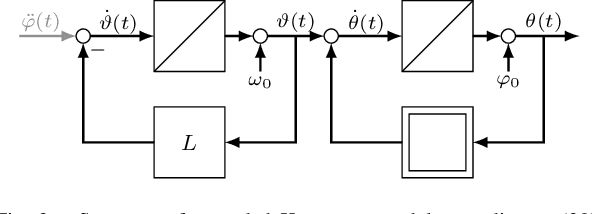
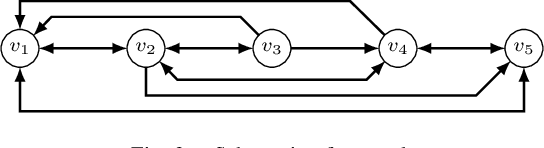
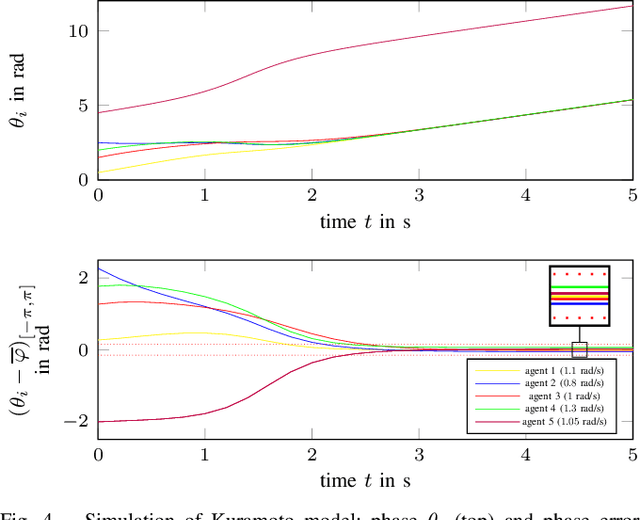
Due to its description of a synchronization between oscillators, the Kuramoto model is an ideal choice for a synchronisation algorithm in networked systems. This requires to achieve not only a frequency synchronization but also a phase synchronization - something the standard Kuramoto model can not provide for a finite number of agents. In this case, a remaining phase difference is necessary to offset differences of the natural frequencies. Setting the Kuramoto model into the context of dynamic consensus and making use of the $n$th order discrete average consensus algorithm, this paper extends the standard Kuramoto model in such a way that frequency and phase synchronization are separated. This in turn leads to an algorithm achieve the required frequency and phase synchronization also for a finite number of agents. Simulations show the viability of this extended Kuramoto model.