 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePostural Virtual Fixtures for Ergonomic Physical Interactions with Supernumerary Robotic Bodies
Jan 30, 2026Conjoined collaborative robots, functioning as supernumerary robotic bodies (SRBs), can enhance human load tolerance abilities. However, in tasks involving physical interaction with humans, users may still adopt awkward, non-ergonomic postures, which can lead to discomfort or injury over time. In this paper, we propose a novel control framework that provides kinesthetic feedback to SRB users when a non-ergonomic posture is detected, offering resistance to discourage such behaviors. This approach aims to foster long-term learning of ergonomic habits and promote proper posture during physical interactions. To achieve this, a virtual fixture method is developed, integrated with a continuous, online ergonomic posture assessment framework. Additionally, to improve coordination between the operator and the SRB, which consists of a robotic arm mounted on a floating base, the position of the floating base is adjusted as needed. Experimental results demonstrate the functionality and efficacy of the ergonomics-driven control framework, including two user studies involving practical loco-manipulation tasks with 14 subjects, comparing the proposed framework with a baseline control framework that does not account for human ergonomics.
A passive admittance controller to enforce Remote Center of Motion and Tool Spatial constraints with application in hands-on surgical procedures
Mar 03, 2022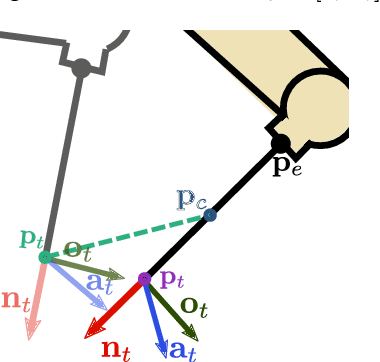

The restriction of feasible motions of a manipulator link constrained to move through an entry port is a common problem in minimum invasive surgery procedures. Additional spatial restrictions are required to ensure the safety of sensitive regions from unintentional damage. In this work, we design a target admittance model that is proved to enforce robot tool manipulation by a human through a remote center of motion and to guarantee that the tool will never enter or touch forbidden regions. The control scheme is proved passive under the exertion of a human force ensuring manipulation stability, and smooth natural motion in hands-on surgical procedures enhancing the user's feeling of control over the task. Its performance is demonstrated by experiments with a setup mimicking a hands-on surgical procedure comprising a KUKA LWR4+ and a virtual intraoperative environment.