 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect Data Driven Control Using Noisy Measurements
May 09, 2025This paper presents a novel direct data-driven control framework for solving the linear quadratic regulator (LQR) under disturbances and noisy state measurements. The system dynamics are assumed unknown, and the LQR solution is learned using only a single trajectory of noisy input-output data while bypassing system identification. Our approach guarantees mean-square stability (MSS) and optimal performance by leveraging convex optimization techniques that incorporate noise statistics directly into the controller synthesis. First, we establish a theoretical result showing that the MSS of an uncertain data-driven system implies the MSS of the true closed-loop system. Building on this, we develop a robust stability condition using linear matrix inequalities (LMIs) that yields a stabilizing controller gain from noisy measurements. Finally, we formulate a data-driven LQR problem as a semidefinite program (SDP) that computes an optimal gain, minimizing the steady-state covariance. Extensive simulations on benchmark systems -- including a rotary inverted pendulum and an active suspension system -- demonstrate the superior robustness and accuracy of our method compared to existing data-driven LQR approaches. The proposed framework offers a practical and theoretically grounded solution for controller design in noise-corrupted environments where system identification is infeasible.
An online evolving framework for advancing reinforcement-learning based automated vehicle control
Jun 16, 2020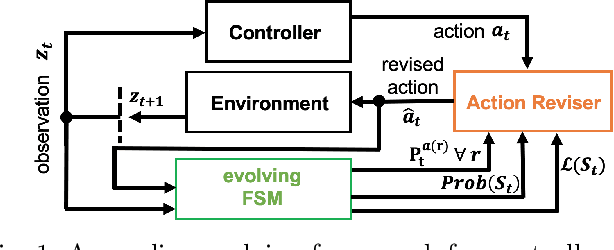

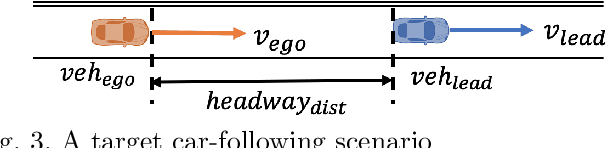
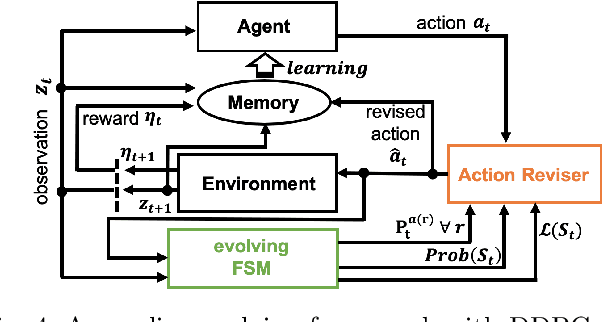
In this paper, an online evolving framework is proposed to detect and revise a controller's imperfect decision-making in advance. The framework consists of three modules: the evolving Finite State Machine (e-FSM), action-reviser, and controller modules. The e-FSM module evolves a stochastic model (e.g., Discrete-Time Markov Chain) from scratch by determining new states and identifying transition probabilities repeatedly. With the latest stochastic model and given criteria, the action-reviser module checks validity of the controller's chosen action by predicting future states. Then, if the chosen action is not appropriate, another action is inspected and selected. In order to show the advantage of the proposed framework, the Deep Deterministic Policy Gradient (DDPG) w/ and w/o the online evolving framework are applied to control an ego-vehicle in the car-following scenario where control criteria are set by speed and safety. Experimental results show that inappropriate actions chosen by the DDPG controller are detected and revised appropriately through our proposed framework, resulting in no control failures after a few iterations.
An Online Evolving Framework for Modeling the Safe Autonomous Vehicle Control System via Online Recognition of Latent Risks
Aug 28, 2019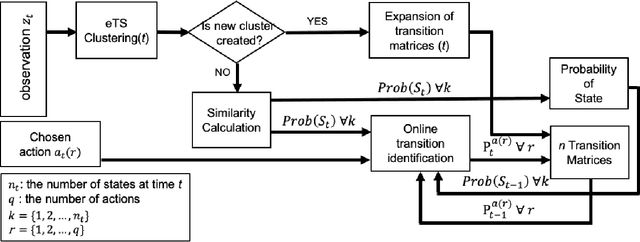
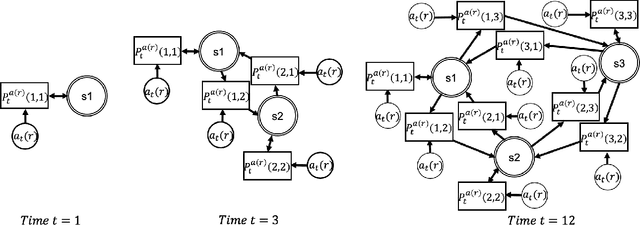
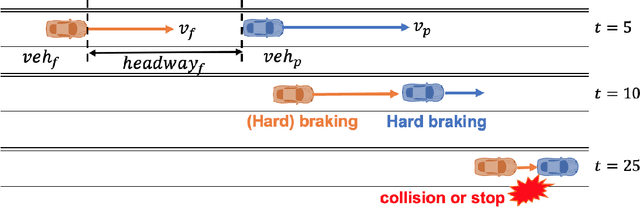
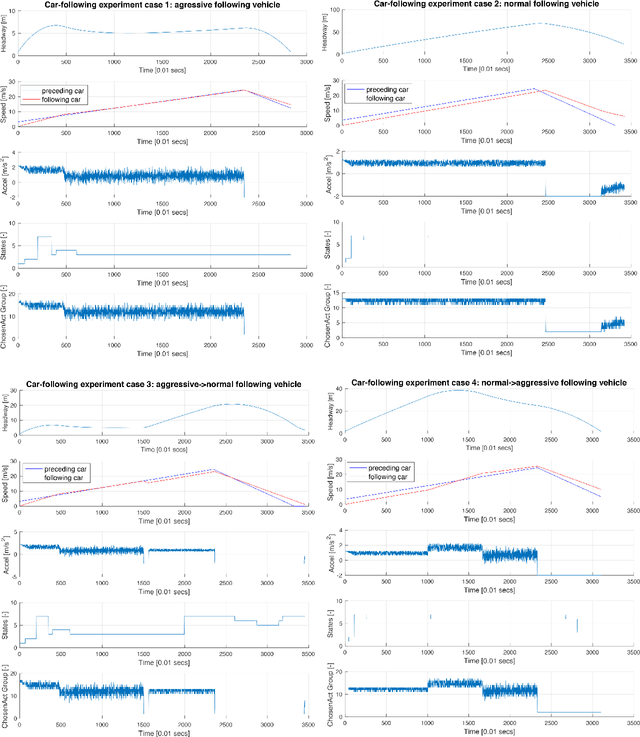
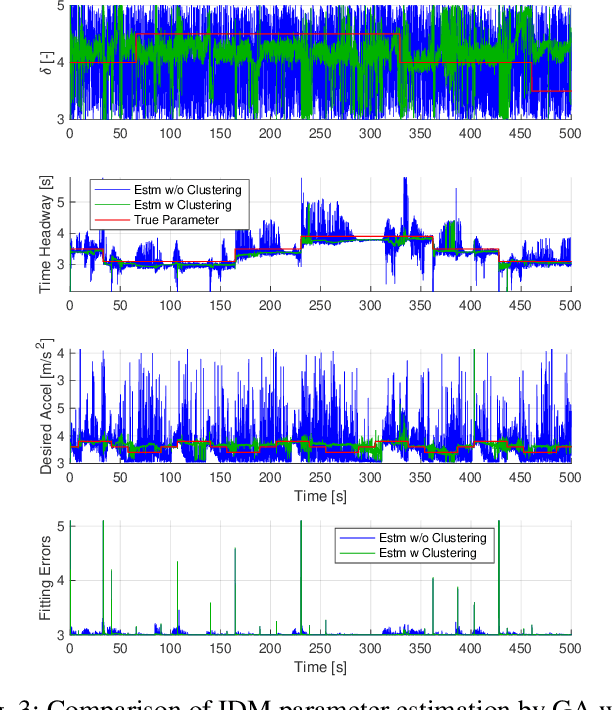
An online evolving framework is proposed to support modeling the safe Automated Vehicle (AV) control system by making the controller able to recognize unexpected situations and react appropriately by choosing a better action. Within the framework, the evolving Finite State Machine (e-FSM), which is an online model able to (1) determine states uniquely as needed, (2) recognize states, and (3) identify state-transitions, is introduced. In this study, the e-FSM's capabilities are explained and illustrated by simulating a simple car-following scenario. As a vehicle controller, the Intelligent Driver Model (IDM) is implemented, and different sets of IDM parameters are assigned to the following vehicle for simulating various situations (including the collision). While simulating the car-following scenario, e-FSM recognizes and determines the states and identifies the transition matrices by suggested methods. To verify if e-FSM can recognize and determine states uniquely, we analyze whether the same state is recognized under the identical situation. The difference between probability distributions of predicted and recognized states is measured by the Jensen-Shannon divergence (JSD) method to validate the accuracy of identified transition-matrices. As shown in the results, the Dead-End state which has latent-risk of the collision is uniquely determined and consistently recognized. Also, the probability distributions of the predicted state are significantly similar to the recognized state, declaring that the state-transitions are precisely identified.
Driving Intention Recognition and Lane Change Prediction on the Highway
Aug 28, 2019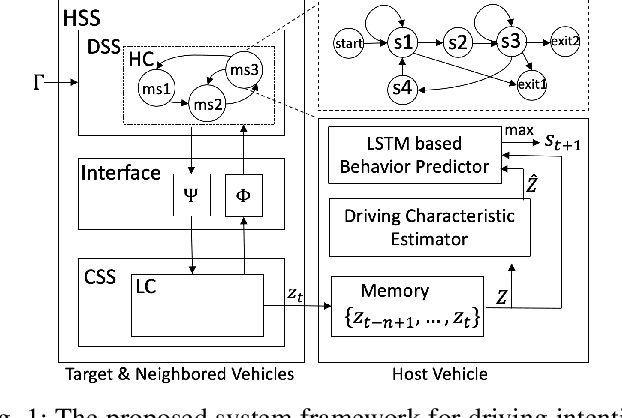
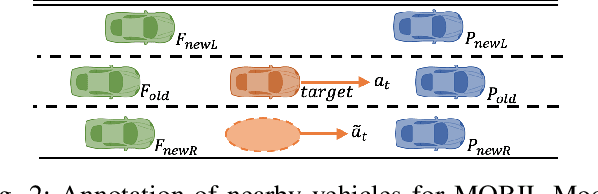
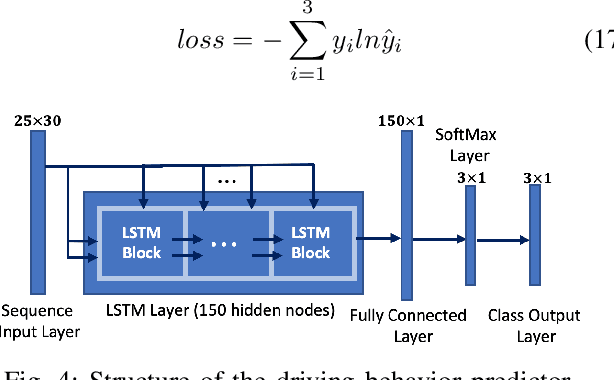
This paper proposes a framework to recognize driving intentions and to predict driving behaviors of lane changing on the highway by using externally sensable traffic data from the host-vehicle. The framework consists of a driving characteristic estimator and a driving behavior predictor. A driver's implicit driving characteristic information is uniquely determined and detected by proposed the online-estimator. Neural-network based behavior predictor is developed and validated by testing with the real naturalistic traffic data from Next Generation Simulation (NGSIM), which demonstrates the effectiveness in identifying the driving characteristics and transforming into accurate behavior prediction in real-world traffic situations.