 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of global optimal coverage control using multiple aerial robots
Apr 28, 2021Coverage control has been widely used for constructing mobile sensor network such as for environmental monitoring, and one of the most commonly used methods is the Lloyd algorithm based on Voronoi partitions. However, when this method is used, the result sometimes converges to a local optimum. To overcome this problem, game theoretic coverage control has been proposed and found to be capable of stochastically deriving the optimal deployment. From a practical point of view, however, it is necessary to make the result converge to the global optimum deterministically. In this paper, we propose a global optimal coverage control along with collision avoidance in continuous space that ensures multiple sensors can deterministically and smoothly move to the global optimal deployment. This approach consists of a cut-in algorithm based on neighborhood importance of measurement and a modified potential method for collision avoidance. The effectiveness of the proposed algorithm has been confirmed through numerous simulations and some experiments using multiple aerial robots.
* 14 pages, 9 figures
Robust shape estimation with false-positive contact detection
Apr 21, 2021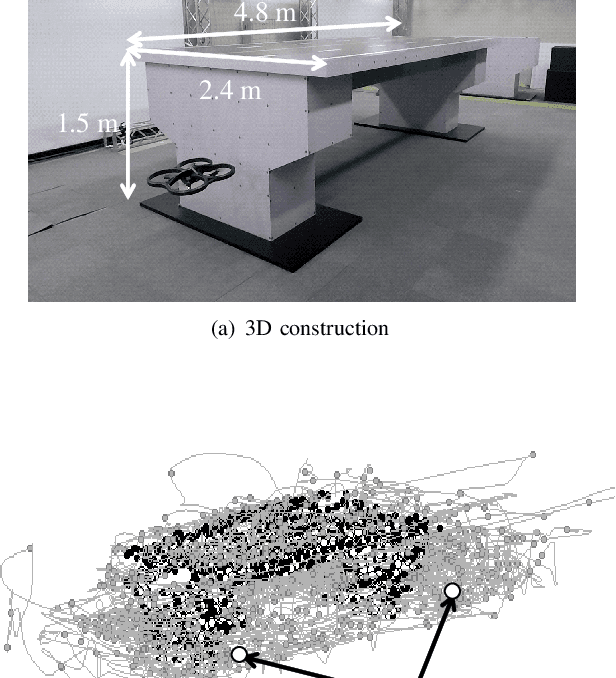
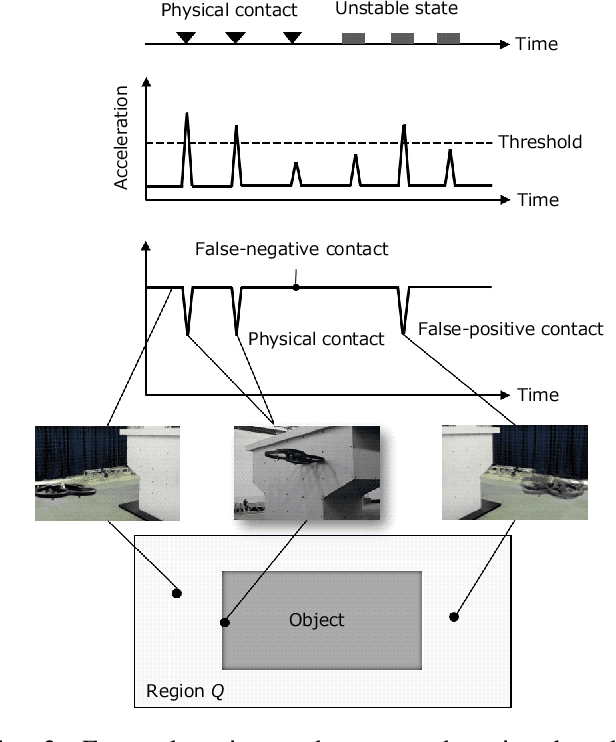
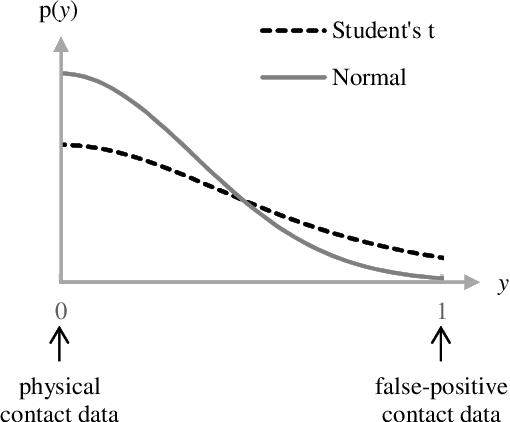
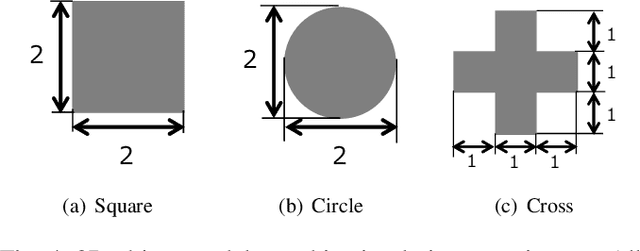
We propose a means of omni-directional contact detection using accelerometers instead of tactile sensors for object shape estimation using touch. Unlike tactile sensors, our contact-based detection method tends to induce a degree of uncertainty with false-positive contact data because the sensors may react not only to actual contact but also to the unstable behavior of the robot. Therefore, it is crucial to consider a robust shape estimation method capable of handling such false-positive contact data. To realize this, we introduce the concept of heteroscedasticity into the contact data and propose a robust shape estimation algorithm based on Gaussian process implicit surfaces (GPIS). We confirmed that our algorithm not only reduces shape estimation errors caused by false-positive contact data but also distinguishes false-positive contact data more clearly than the GPIS through simulations and actual experiments using a quadcopter.
* 12pages, 11 figures