 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarm Robots Inspired by Friendship Formation Process
Aug 11, 2018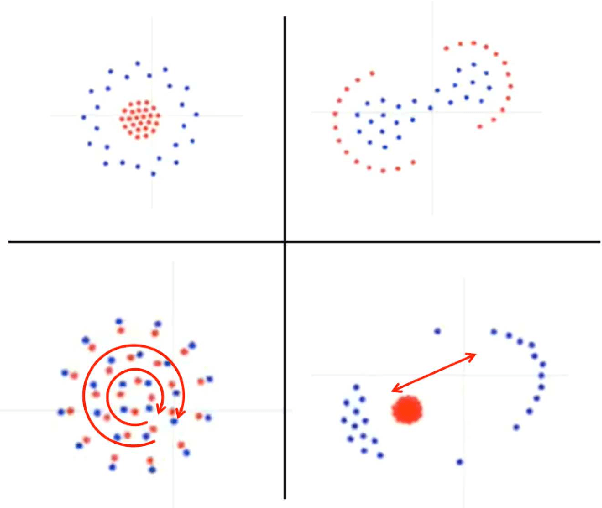

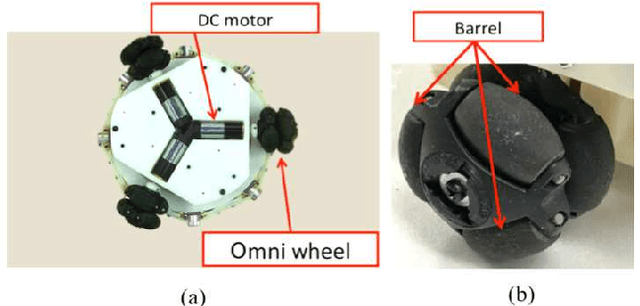
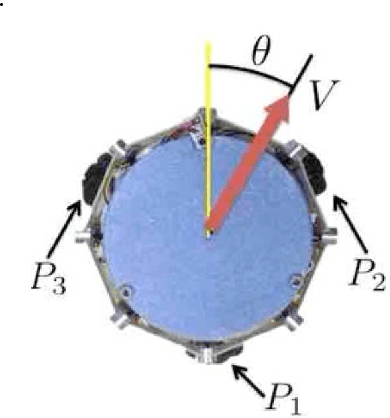
Swarm robotic systems are systems in which multiple robots having simple functionality perform tasks through their cooperation, and are advantageous in that they can exhibit non-trivial macroscopic functions such as adaptability, fault tolerance, and scalability. We previously proposed a simple model of swarm formation inspired by friendship formation process in human society, and demonstrated via simulation that various non-trivial patterns emerge. In this study, we examine the applicability of the proposed model to a swarm robotic system. As a first step, we developed five robots and demonstrated via real-world experiments that the simulation results can be largely reproduced.
Path Integral Networks: End-to-End Differentiable Optimal Control
Jun 29, 2017
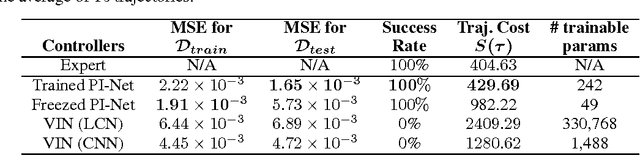
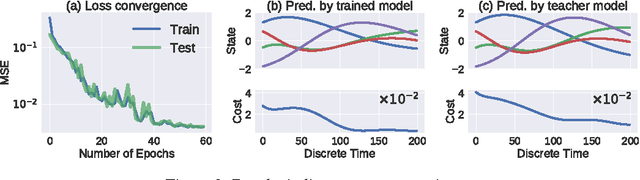

In this paper, we introduce Path Integral Networks (PI-Net), a recurrent network representation of the Path Integral optimal control algorithm. The network includes both system dynamics and cost models, used for optimal control based planning. PI-Net is fully differentiable, learning both dynamics and cost models end-to-end by back-propagation and stochastic gradient descent. Because of this, PI-Net can learn to plan. PI-Net has several advantages: it can generalize to unseen states thanks to planning, it can be applied to continuous control tasks, and it allows for a wide variety learning schemes, including imitation and reinforcement learning. Preliminary experiment results show that PI-Net, trained by imitation learning, can mimic control demonstrations for two simulated problems; a linear system and a pendulum swing-up problem. We also show that PI-Net is able to learn dynamics and cost models latent in the demonstrations.