Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarm Robots Inspired by Friendship Formation Process
Aug 11, 2018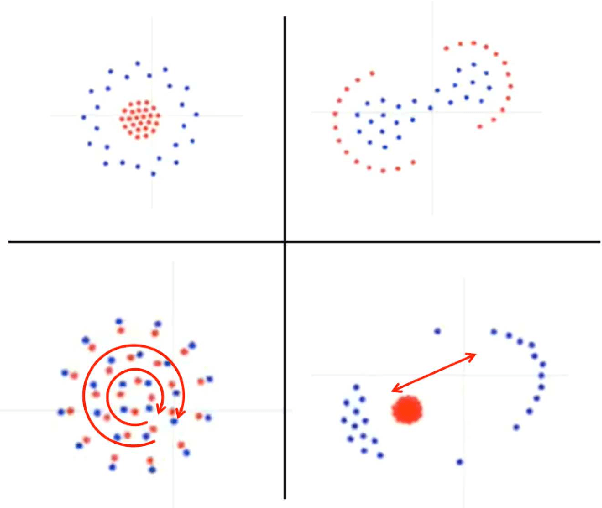

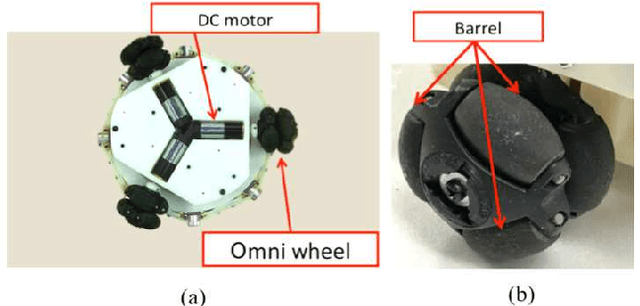
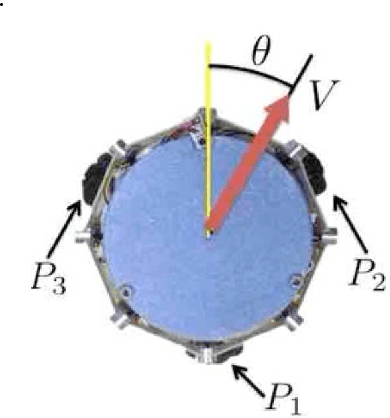
Swarm robotic systems are systems in which multiple robots having simple functionality perform tasks through their cooperation, and are advantageous in that they can exhibit non-trivial macroscopic functions such as adaptability, fault tolerance, and scalability. We previously proposed a simple model of swarm formation inspired by friendship formation process in human society, and demonstrated via simulation that various non-trivial patterns emerge. In this study, we examine the applicability of the proposed model to a swarm robotic system. As a first step, we developed five robots and demonstrated via real-world experiments that the simulation results can be largely reproduced.
* 9 pages, 8 figures
Via