 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehaviour diversity in a walking and climbing centipede-like virtual creature
Nov 19, 2024Robot controllers are often optimised for a single robot in a single environment. This approach proves brittle, as such a controller will often fail to produce sensible behavior for a new morphology or environment. In comparison, animal gaits are robust and versatile. By observing animals, and attempting to extract general principles of locomotion from their movement, we aim to design a single decentralised controller applicable to diverse morphologies and environments. The controller implements the three components 1) undulation, 2) peristalsis, and 3) leg motion, which we believe are the essential elements in most animal gaits. The controller is tested on a variety of simulated centipede-like robots. The centipede is chosen as inspiration because it moves using both body contractions and legged locomotion. For a controller to work in qualitatively different settings, it must also be able to exhibit qualitatively different behaviors. We find that six different modes of locomotion emerge from our controller in response to environmental and morphological changes. We also find that different parts of the centipede model can exhibit different modes of locomotion, simultaneously, based on local morphological features. This controller can potentially aid in the design or evolution of robots, by quickly testing the potential of a morphology, or be used to get insights about underlying locomotion principles in the centipede.
Swarm Robots Inspired by Friendship Formation Process
Aug 11, 2018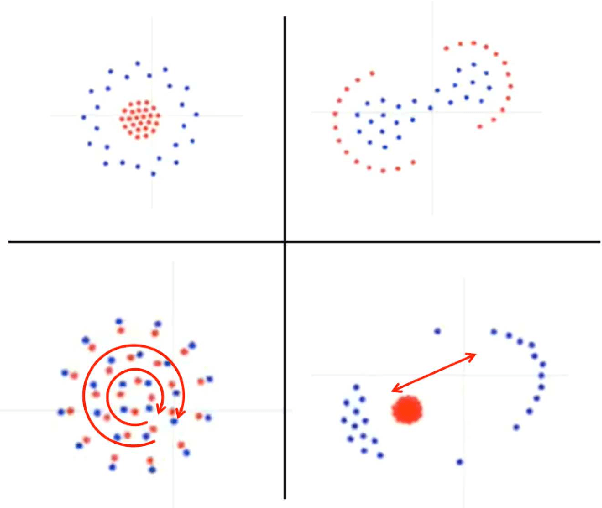

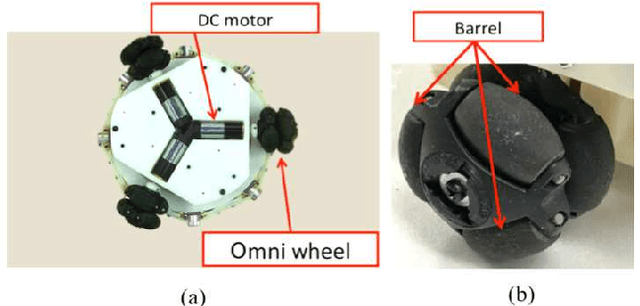
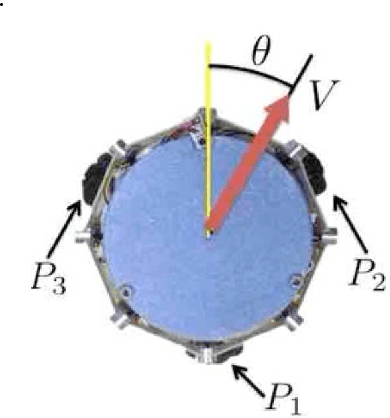
Swarm robotic systems are systems in which multiple robots having simple functionality perform tasks through their cooperation, and are advantageous in that they can exhibit non-trivial macroscopic functions such as adaptability, fault tolerance, and scalability. We previously proposed a simple model of swarm formation inspired by friendship formation process in human society, and demonstrated via simulation that various non-trivial patterns emerge. In this study, we examine the applicability of the proposed model to a swarm robotic system. As a first step, we developed five robots and demonstrated via real-world experiments that the simulation results can be largely reproduced.
Interlimb neural connection is not required for gait transition in quadruped locomotion
Oct 28, 2013

Quadrupeds transition spontaneously to various gait patterns (e.g., walk, trot, pace, gallop) in response to the locomotion speed. The generation of these gait patterns has been the subject of debate for a long time. We propose a coupled oscillator model that is coupled with the physical interactions of the body. The results of this study showed that the gait pattern transitions spontaneously to walking/trotting/pacing/bounding in manner similar to that of real quadruped animals when the resonating portion of the body is changed according to the speed of leg movement. We also observed that pacing is expressed exclusively instead of trotting by changing the physical characteristics. In addition to leading to understanding of the principles of locomotion in living things, the coupled oscillator model proposed in this study is expected to lead to the creation of a legged robot that can select an energy-efficient gait and transition to it spontaneously.