 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Visual Information Processing in Multimodal LLMs
Nov 13, 2025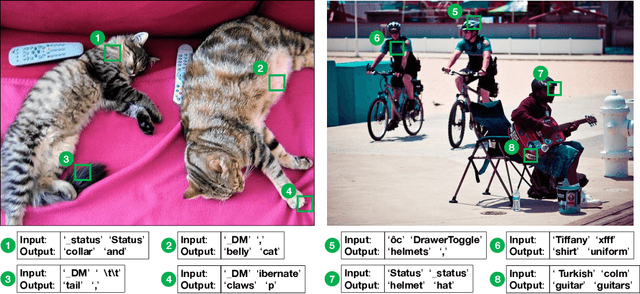
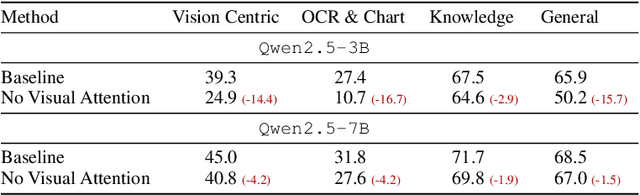
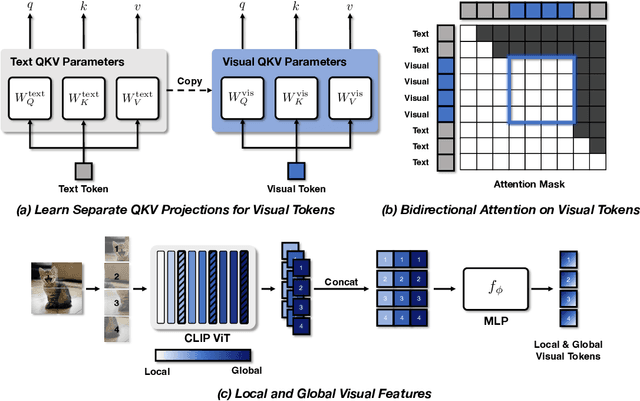
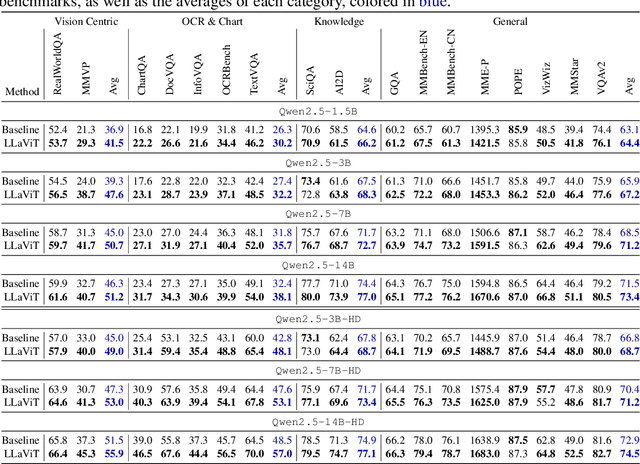
Despite the remarkable success of the LLaVA architecture for vision-language tasks, its design inherently struggles to effectively integrate visual features due to the inherent mismatch between text and vision modalities. We tackle this issue from a novel perspective in which the LLM not only serves as a language model but also a powerful vision encoder. To this end, we present LLaViT - Large Language Models as extended Vision Transformers - which enables the LLM to simultaneously function as a vision encoder through three key modifications: (1) learning separate QKV projections for vision modality, (2) enabling bidirectional attention on visual tokens, and (3) incorporating both global and local visual representations. Through extensive controlled experiments on a wide range of LLMs, we demonstrate that LLaViT significantly outperforms the baseline LLaVA method on a multitude of benchmarks, even surpassing models with double its parameter count, establishing a more effective approach to vision-language modeling.
Policy Distillation with Selective Input Gradient Regularization for Efficient Interpretability
May 18, 2022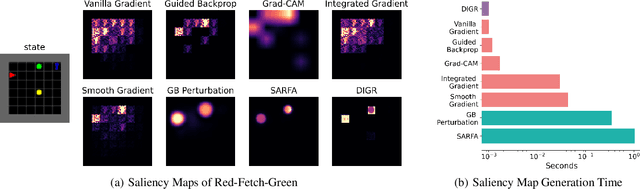
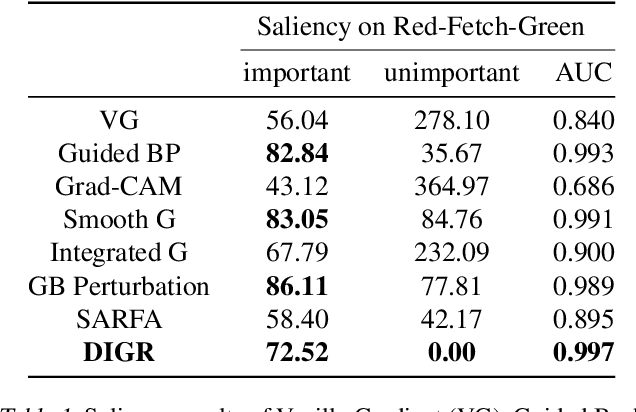
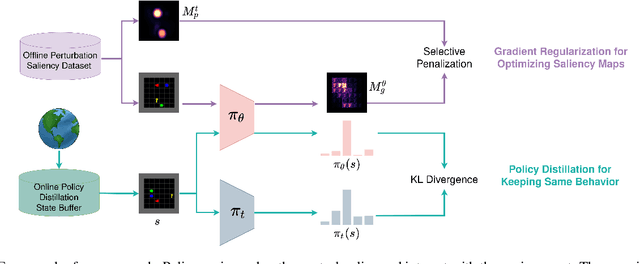
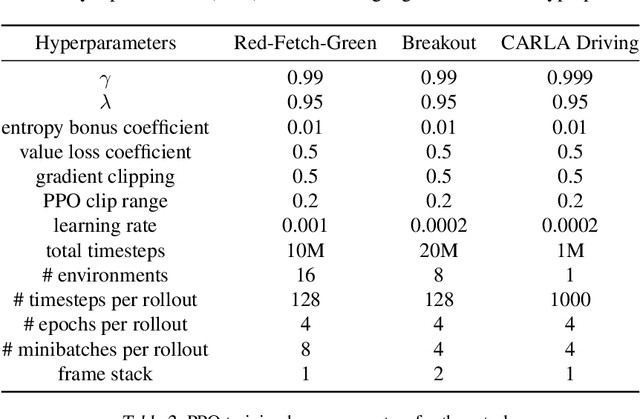
Although deep Reinforcement Learning (RL) has proven successful in a wide range of tasks, one challenge it faces is interpretability when applied to real-world problems. Saliency maps are frequently used to provide interpretability for deep neural networks. However, in the RL domain, existing saliency map approaches are either computationally expensive and thus cannot satisfy the real-time requirement of real-world scenarios or cannot produce interpretable saliency maps for RL policies. In this work, we propose an approach of Distillation with selective Input Gradient Regularization (DIGR) which uses policy distillation and input gradient regularization to produce new policies that achieve both high interpretability and computation efficiency in generating saliency maps. Our approach is also found to improve the robustness of RL policies to multiple adversarial attacks. We conduct experiments on three tasks, MiniGrid (Fetch Object), Atari (Breakout) and CARLA Autonomous Driving, to demonstrate the importance and effectiveness of our approach.
Domain Adaptation In Reinforcement Learning Via Latent Unified State Representation
Feb 10, 2021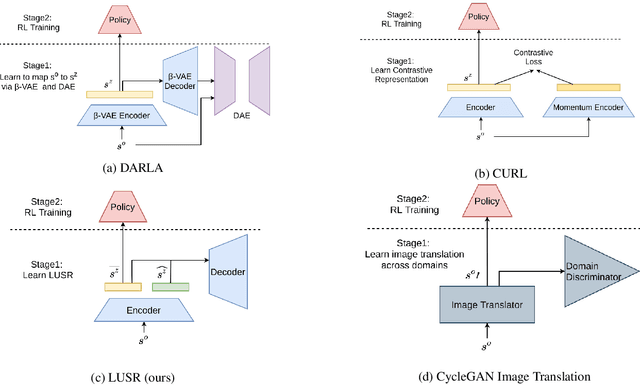

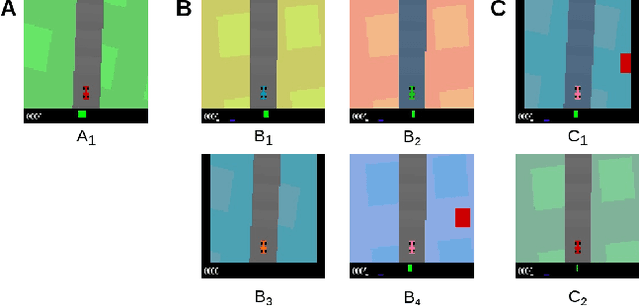
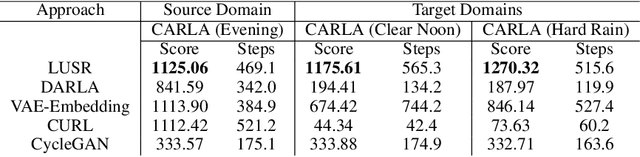
Despite the recent success of deep reinforcement learning (RL), domain adaptation remains an open problem. Although the generalization ability of RL agents is critical for the real-world applicability of Deep RL, zero-shot policy transfer is still a challenging problem since even minor visual changes could make the trained agent completely fail in the new task. To address this issue, we propose a two-stage RL agent that first learns a latent unified state representation (LUSR) which is consistent across multiple domains in the first stage, and then do RL training in one source domain based on LUSR in the second stage. The cross-domain consistency of LUSR allows the policy acquired from the source domain to generalize to other target domains without extra training. We first demonstrate our approach in variants of CarRacing games with customized manipulations, and then verify it in CARLA, an autonomous driving simulator with more complex and realistic visual observations. Our results show that this approach can achieve state-of-the-art domain adaptation performance in related RL tasks and outperforms prior approaches based on latent-representation based RL and image-to-image translation.