 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere to Map? Iterative Rover-Copter Path Planning for Mars Exploration
Aug 17, 2020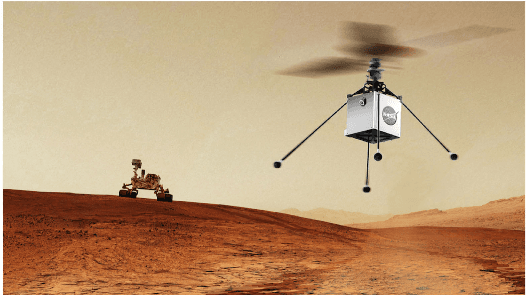

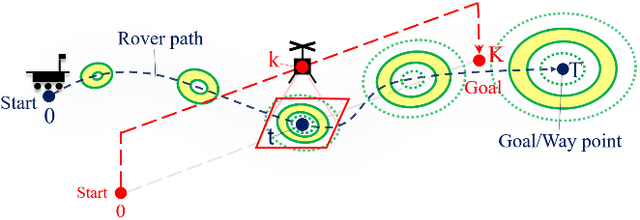
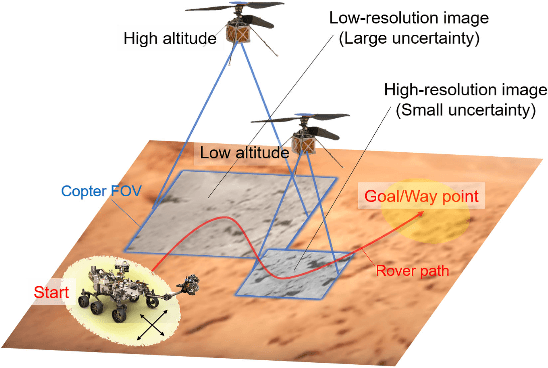
In addition to conventional ground rovers, the Mars 2020 mission will send a helicopter to Mars. The copter's high-resolution data helps the rover to identify small hazards such as steps and pointy rocks, as well as providing rich textual information useful to predict perception performance. In this paper, we consider a three-agent system composed of a Mars rover, copter, and orbiter. The objective is to provide good localization to the rover by selecting an optimal path that minimizes the localization uncertainty accumulation during the rover's traverse. To achieve this goal, we quantify the localizability as a goodness measure associated with the map, and conduct a joint-space search over rover's path and copter's perceptual actions given prior information from the orbiter. We jointly address where to map by the copter and where to drive by the rover using the proposed iterative copter-rover path planner. We conducted numerical simulations using the map of Mars 2020 landing site to demonstrate the effectiveness of the proposed planner.
* 8 pages, 7 figures