 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning agent's spatial configuration from sensorimotor invariants
Oct 03, 2018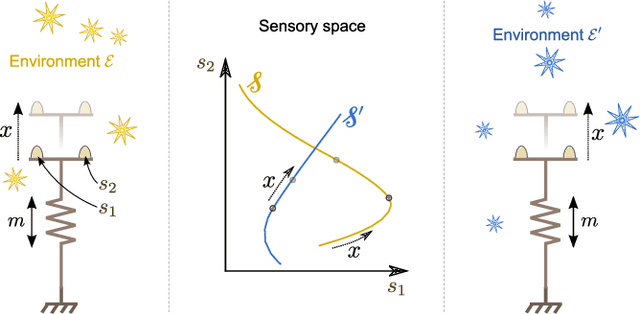
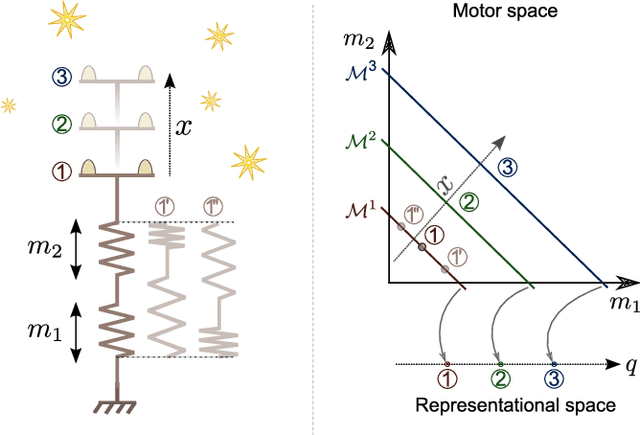
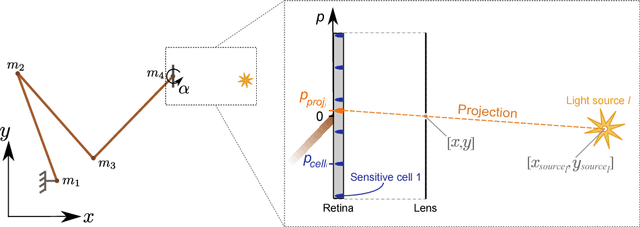
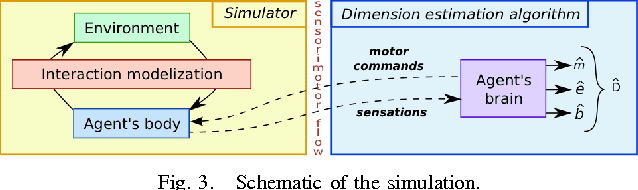
The design of robotic systems is largely dictated by our purely human intuition about how we perceive the world. This intuition has been proven incorrect with regard to a number of critical issues, such as visual change blindness. In order to develop truly autonomous robots, we must step away from this intuition and let robotic agents develop their own way of perceiving. The robot should start from scratch and gradually develop perceptual notions, under no prior assumptions, exclusively by looking into its sensorimotor experience and identifying repetitive patterns and invariants. One of the most fundamental perceptual notions, space, cannot be an exception to this requirement. In this paper we look into the prerequisites for the emergence of simplified spatial notions on the basis of a robot's sensorimotor flow. We show that the notion of space as environment-independent cannot be deduced solely from exteroceptive information, which is highly variable and is mainly determined by the contents of the environment. The environment-independent definition of space can be approached by looking into the functions that link the motor commands to changes in exteroceptive inputs. In a sufficiently rich environment, the kernels of these functions correspond uniquely to the spatial configuration of the agent's exteroceptors. We simulate a redundant robotic arm with a retina installed at its end-point and show how this agent can learn the configuration space of its retina. The resulting manifold has the topology of the Cartesian product of a plane and a circle, and corresponds to the planar position and orientation of the retina.
* 26 pages, 5 images, published in Robotics and Autonomous Systems
A Non-linear Approach to Space Dimension Perception by a Naive Agent
Oct 03, 2018

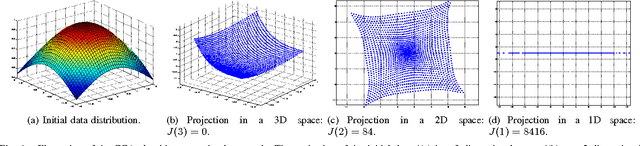
Developmental Robotics offers a new approach to numerous AI features that are often taken as granted. Traditionally, perception is supposed to be an inherent capacity of the agent. Moreover, it largely relies on models built by the system's designer. A new approach is to consider perception as an experimentally acquired ability that is learned exclusively through the analysis of the agent's sensorimotor flow. Previous works, based on H.Poincar\'e's intuitions and the sensorimotor contingencies theory, allow a simulated agent to extract the dimension of geometrical space in which it is immersed without any a priori knowledge. Those results are limited to infinitesimal movement's amplitude of the system. In this paper, a non-linear dimension estimation method is proposed to push back this limitation.