 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Non-linear Approach to Space Dimension Perception by a Naive Agent
Oct 03, 2018

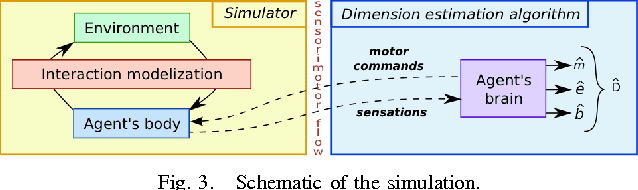
Developmental Robotics offers a new approach to numerous AI features that are often taken as granted. Traditionally, perception is supposed to be an inherent capacity of the agent. Moreover, it largely relies on models built by the system's designer. A new approach is to consider perception as an experimentally acquired ability that is learned exclusively through the analysis of the agent's sensorimotor flow. Previous works, based on H.Poincar\'e's intuitions and the sensorimotor contingencies theory, allow a simulated agent to extract the dimension of geometrical space in which it is immersed without any a priori knowledge. Those results are limited to infinitesimal movement's amplitude of the system. In this paper, a non-linear dimension estimation method is proposed to push back this limitation.