 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Based Benchmarking Metrics for Multimodal Synthetic Images
Nov 19, 2025

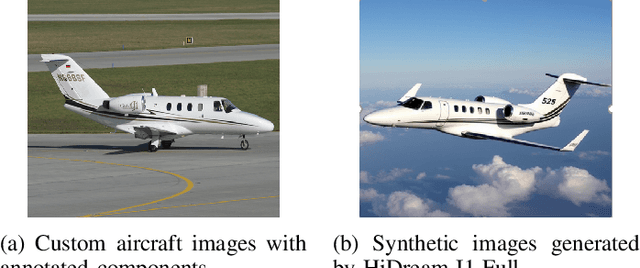

Current state of the art measures like BLEU, CIDEr, VQA score, SigLIP-2 and CLIPScore are often unable to capture semantic or structural accuracy, especially for domain-specific or context-dependent scenarios. For this, this paper proposes a Physics-Constrained Multimodal Data Evaluation (PCMDE) metric combining large language models with reasoning, knowledge based mapping and vision-language models to overcome these limitations. The architecture is comprised of three main stages: (1) feature extraction of spatial and semantic information with multimodal features through object detection and VLMs; (2) Confidence-Weighted Component Fusion for adaptive component-level validation; and (3) physics-guided reasoning using large language models for structural and relational constraints (e.g., alignment, position, consistency) enforcement.
Advanced Tool Learning and Selection System (ATLASS): A Closed-Loop Framework Using LLM
Mar 13, 2025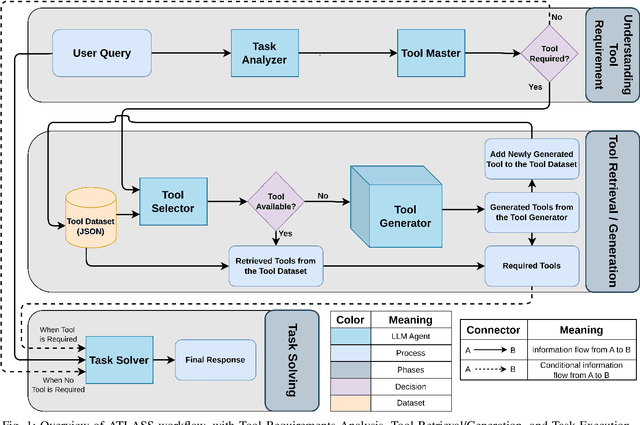
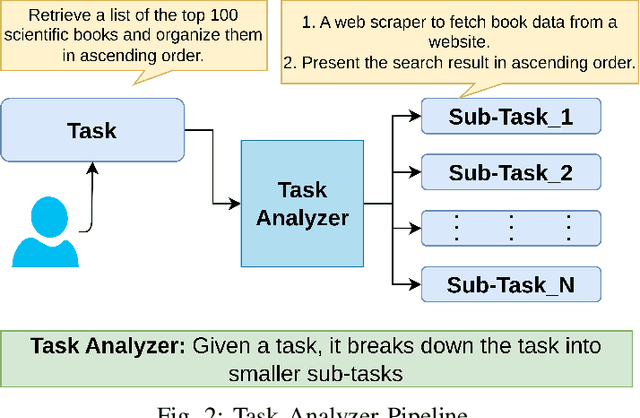
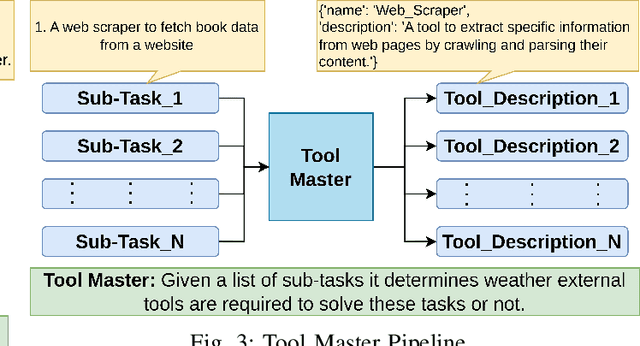
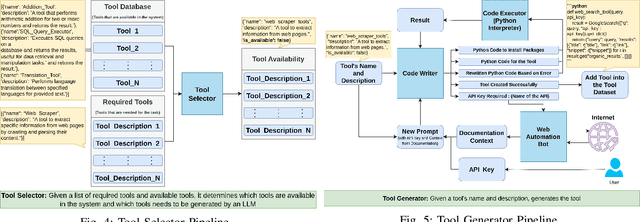
The combination of LLM agents with external tools enables models to solve complex tasks beyond their knowledge base. Human-designed tools are inflexible and restricted to solutions within the scope of pre-existing tools created by experts. To address this problem, we propose ATLASS, an advanced tool learning and selection system designed as a closed-loop framework. It enables the LLM to solve problems by dynamically generating external tools on demand. In this framework, agents play a crucial role in orchestrating tool selection, execution, and refinement, ensuring adaptive problem-solving capabilities. The operation of ATLASS follows three phases: The first phase, Understanding Tool Requirements, involves the Agents determining whether tools are required and specifying their functionality; the second phase, Tool Retrieval/Generation, involves the Agents retrieving or generating tools based on their availability; and the third phase, Task Solving, involves combining all the component tools necessary to complete the initial task. The Tool Dataset stores the generated tools, ensuring reusability and minimizing inference cost. Current LLM-based tool generation systems have difficulty creating complex tools that need APIs or external packages. In ATLASS, we solve the problem by automatically setting up the environment, fetching relevant API documentation online, and using a Python interpreter to create a reliable, versatile tool that works in a wider range of situations. OpenAI GPT-4.0 is used as the LLM agent, and safety and ethical concerns are handled through human feedback before executing generated code. By addressing the limitations of predefined toolsets and enhancing adaptability, ATLASS serves as a real-world solution that empowers users with dynamically generated tools for complex problem-solving.
UAV (Unmanned Aerial Vehicles): Diverse Applications of UAV Datasets in Segmentation, Classification, Detection, and Tracking
Sep 05, 2024



Unmanned Aerial Vehicles (UAVs), have greatly revolutionized the process of gathering and analyzing data in diverse research domains, providing unmatched adaptability and effectiveness. This paper presents a thorough examination of Unmanned Aerial Vehicle (UAV) datasets, emphasizing their wide range of applications and progress. UAV datasets consist of various types of data, such as satellite imagery, images captured by drones, and videos. These datasets can be categorized as either unimodal or multimodal, offering a wide range of detailed and comprehensive information. These datasets play a crucial role in disaster damage assessment, aerial surveillance, object recognition, and tracking. They facilitate the development of sophisticated models for tasks like semantic segmentation, pose estimation, vehicle re-identification, and gesture recognition. By leveraging UAV datasets, researchers can significantly enhance the capabilities of computer vision models, thereby advancing technology and improving our understanding of complex, dynamic environments from an aerial perspective. This review aims to encapsulate the multifaceted utility of UAV datasets, emphasizing their pivotal role in driving innovation and practical applications in multiple domains.