 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeodesic Tracing-Based Kinematic Integration of Rolling and Sliding Contact on Manifold Meshes for Dexterous In-Hand Manipulation
Aug 17, 2025
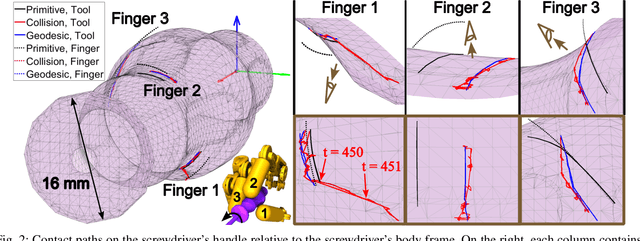

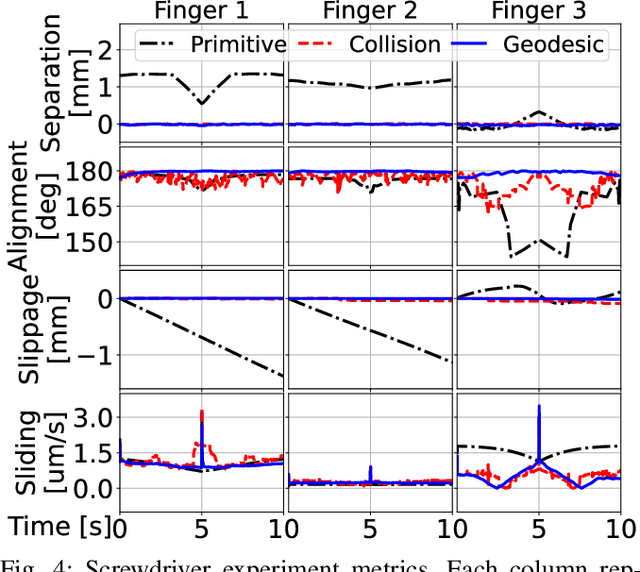
Reasoning about rolling and sliding contact, or roll-slide contact for short, is critical for dexterous manipulation tasks that involve intricate geometries. But existing works on roll-slide contact mostly focus on continuous shapes with differentiable parametrizations. This work extends roll-slide contact modeling to manifold meshes. Specifically, we present an integration scheme based on geodesic tracing to first-order time-integrate roll-slide contact directly on meshes, enabling dexterous manipulation to reason over high-fidelity discrete representations of an object's true geometry. Using our method, we planned dexterous motions of a multi-finger robotic hand manipulating five objects in-hand in simulation. The planning was achieved with a least-squares optimizer that strives to maintain the most stable instantaneous grasp by minimizing contact sliding and spinning. Then, we evaluated our method against a baseline using collision detection and a baseline using primitive shapes. The results show that our method performed the best in accuracy and precision, even for coarse meshes. We conclude with a future work discussion on incorporating multiple contacts and contact forces to achieve accurate and robust mesh-based surface contact modeling.
Evolutionary Greedy Algorithm for Optimal Sensor Placement Problem in Urban Sewage Surveillance
Sep 25, 2024



Designing a cost-effective sensor placement plan for sewage surveillance is a crucial task because it allows cost-effective early pandemic outbreak detection as supplementation for individual testing. However, this problem is computationally challenging to solve, especially for massive sewage networks having complicated topologies. In this paper, we formulate this problem as a multi-objective optimization problem to consider the conflicting objectives and put forward a novel evolutionary greedy algorithm (EG) to enable efficient and effective optimization for large-scale directed networks. The proposed model is evaluated on both small-scale synthetic networks and a large-scale, real-world sewage network in Hong Kong. The experiments on small-scale synthetic networks demonstrate a consistent efficiency improvement with reasonable optimization performance and the real-world application shows that our method is effective in generating optimal sensor placement plans to guide policy-making.
The Foundational Pose as a Selection Mechanism for the Design of Tool-Wielding Multi-Finger Robotic Hands
Sep 21, 2024



To wield an object means to hold and move it in a way that exploits its functions. When we wield tools -- such as writing with a pen or cutting with scissors -- our hands would reach very specific poses, often drastically different from how we pick up the same objects just to transport them. In this work, we investigate the design of tool-wielding multi-finger robotic hands based on a hypothesis: the poses that a tool and a hand reach during tool-wielding -- what we call "foundational poses" (FPs) -- can be used as a selection mechanism in the design process. We interpret FPs as snapshots that capture the workings of underlying mechanisms formed by the tool and the hand, and one hand can form multiple mechanisms with the same tool. We tested our hypothesis in a hand design experiment, where we developed a sampling-based design optimization framework that uses FPs to computationally generate many different hand designs and evaluate them in multiple metrics. The results show that more than $99\%$ of the $10,785$ generated hand designs successfully wielded tools in simulation, supporting our hypothesis. Meanwhile, our methods provide insights into the non-convex, multi-objective hand design optimization problem that could be hard to unveil otherwise, such as clustering and the Pareto front. Lastly, we demonstrate our methods' real-world feasibility and potential with a hardware prototype equipped with rigid endoskeleton and soft skin.
Dynamic Locomotion Teleoperation of a Wheeled Humanoid Robot Reduced Model with a Whole-Body Human-Machine Interface
Sep 08, 2021



Bilateral teleoperation provides humanoid robots with human planning intelligence while enabling the human to feel what the robot feels. It has the potential to transform physically capable humanoid robots into dynamically intelligent ones. However, dynamic bilateral locomotion teleoperation remains as a challenge due to the complex dynamics it involves. This work presents our initial step to tackle this challenge via the concept of wheeled humanoid robot locomotion teleoperation by body tilt. Specifically, we developed a force-feedback-capable whole-body human-machine interface (HMI), and designed a force feedback mapping and two teleoperation mappings that map the human's body tilt to the robot's velocity or acceleration. We compared the two mappings and studied the force feedback's effect via an experiment, where seven human subjects teleoperated a simulated robot with the HMI to perform dynamic target tracking tasks. The experimental results suggest that all subjects accomplished the tasks with both mappings after practice, and the force feedback improved their performances. However, the subjects exhibited two distinct teleoperation styles, which benefited from the force feedback differently. Moreover, the force feedback affected the subjects' preferences on the teleoperation mappings, though most subjects performed better with the velocity mapping.
A Comparison Between Joint Space and Task Space Mappings for Dynamic Teleoperation of an Anthropomorphic Robotic Arm in Reaction Tests
Nov 04, 2020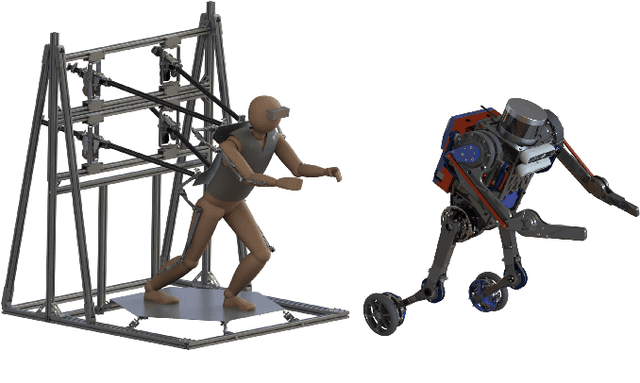

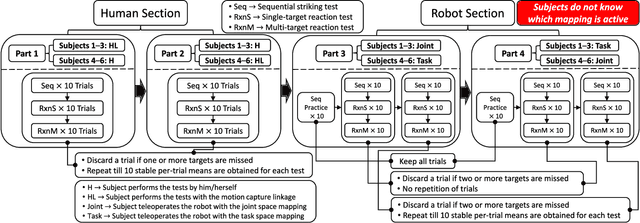
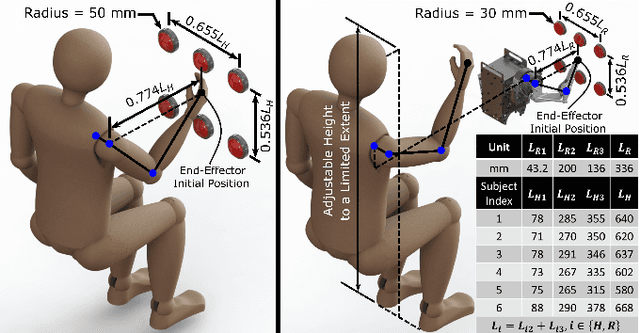
Teleoperation (i.e., controlling a robot with human motion) proves promising in enabling a humanoid robot to move as dynamically as a human. But how to map human motion to a humanoid robot matters because a human and a humanoid robot rarely have identical topologies and dimensions. This work presents an experimental study that utilizes reaction tests to compare the proposed joint space mapping and the proposed task space mapping for dynamic teleoperation of an anthropomorphic robotic arm that possesses human-level dynamic motion capabilities. The experimental results suggest that the robot achieved similar and, in some cases, human-level dynamic performances with both mappings for the six participating human subjects. All subjects became proficient at teleoperating the robot with both mappings after practice, despite that the subjects and the robot differed in size and link length ratio and that the teleoperation required the subjects to move unintuitively. Yet, most subjects developed their teleoperation proficiencies more quickly with the task space mapping than with the joint space mapping after similar amounts of practice. This study also indicates the potential values of a three-dimensional task space mapping, a teleoperation training simulator, and force feedback to the human pilot for intuitive and dynamic teleoperation of a humanoid robot's arms.