 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeALERT Open Dataset and Input-Size-Agnostic Vision Transformer for Driver Activity Recognition using IR-UWB
Dec 13, 2025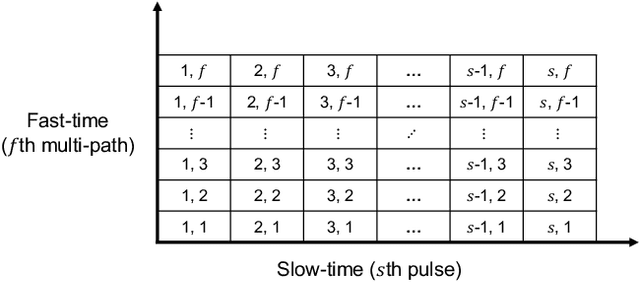
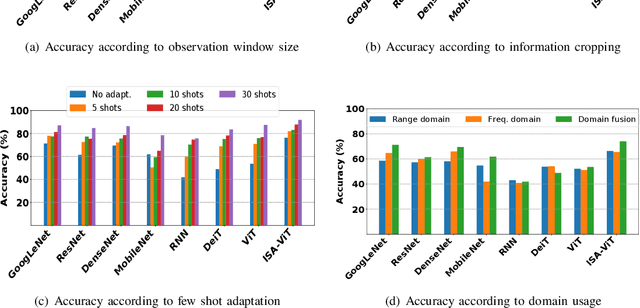
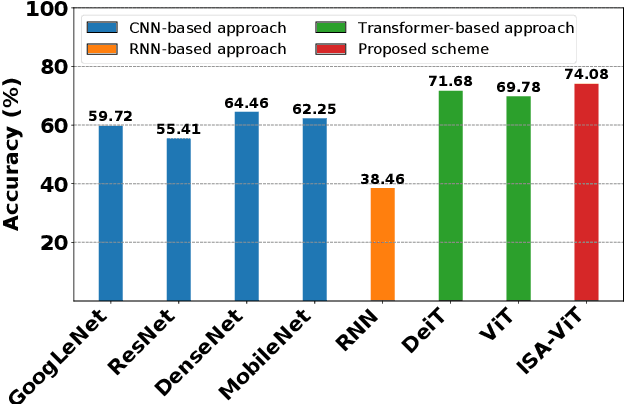
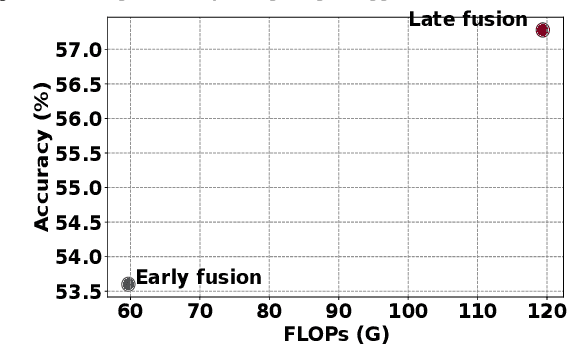
Distracted driving contributes to fatal crashes worldwide. To address this, researchers are using driver activity recognition (DAR) with impulse radio ultra-wideband (IR-UWB) radar, which offers advantages such as interference resistance, low power consumption, and privacy preservation. However, two challenges limit its adoption: the lack of large-scale real-world UWB datasets covering diverse distracted driving behaviors, and the difficulty of adapting fixed-input Vision Transformers (ViTs) to UWB radar data with non-standard dimensions. This work addresses both challenges. We present the ALERT dataset, which contains 10,220 radar samples of seven distracted driving activities collected in real driving conditions. We also propose the input-size-agnostic Vision Transformer (ISA-ViT), a framework designed for radar-based DAR. The proposed method resizes UWB data to meet ViT input requirements while preserving radar-specific information such as Doppler shifts and phase characteristics. By adjusting patch configurations and leveraging pre-trained positional embedding vectors (PEVs), ISA-ViT overcomes the limitations of naive resizing approaches. In addition, a domain fusion strategy combines range- and frequency-domain features to further improve classification performance. Comprehensive experiments demonstrate that ISA-ViT achieves a 22.68% accuracy improvement over an existing ViT-based approach for UWB-based DAR. By publicly releasing the ALERT dataset and detailing our input-size-agnostic strategy, this work facilitates the development of more robust and scalable distracted driving detection systems for real-world deployment.
ConcreTizer: Model Inversion Attack via Occupancy Classification and Dispersion Control for 3D Point Cloud Restoration
Mar 10, 2025The growing use of 3D point cloud data in autonomous vehicles (AVs) has raised serious privacy concerns, particularly due to the sensitive information that can be extracted from 3D data. While model inversion attacks have been widely studied in the context of 2D data, their application to 3D point clouds remains largely unexplored. To fill this gap, we present the first in-depth study of model inversion attacks aimed at restoring 3D point cloud scenes. Our analysis reveals the unique challenges, the inherent sparsity of 3D point clouds and the ambiguity between empty and non-empty voxels after voxelization, which are further exacerbated by the dispersion of non-empty voxels across feature extractor layers. To address these challenges, we introduce ConcreTizer, a simple yet effective model inversion attack designed specifically for voxel-based 3D point cloud data. ConcreTizer incorporates Voxel Occupancy Classification to distinguish between empty and non-empty voxels and Dispersion-Controlled Supervision to mitigate non-empty voxel dispersion. Extensive experiments on widely used 3D feature extractors and benchmark datasets, such as KITTI and Waymo, demonstrate that ConcreTizer concretely restores the original 3D point cloud scene from disrupted 3D feature data. Our findings highlight both the vulnerability of 3D data to inversion attacks and the urgent need for robust defense strategies.
UpCycling: Semi-supervised 3D Object Detection without Sharing Raw-level Unlabeled Scenes
Nov 22, 2022



Semi-supervised Learning (SSL) has received increasing attention in autonomous driving to relieve enormous burden for 3D annotation. In this paper, we propose UpCycling, a novel SSL framework for 3D object detection with zero additional raw-level point cloud: learning from unlabeled de-identified intermediate features (i.e., smashed data) for privacy preservation. The intermediate features do not require additional computation on autonomous vehicles since they are naturally produced by the inference pipeline. However, augmenting 3D scenes at a feature level turns out to be a critical issue: applying the augmentation methods in the latest semi-supervised 3D object detectors distorts intermediate features, which causes the pseudo-labels to suffer from significant noise. To solve the distortion problem while achieving highly effective SSL, we introduce hybrid pseudo labels, feature-level Ground Truth sampling (F-GT) and Rotation (F-RoT), which safely augment unlabeled multi-type 3D scene features and provide high-quality supervision. We implement UpCycling on two representative 3D object detection models, SECOND-IoU and PV-RCNN, and perform experiments on widely-used datasets (Waymo, KITTI, and Lyft). While preserving privacy with zero raw-point scene, UpCycling significantly outperforms the state-of-the-art SSL methods that utilize raw-point scenes, in both domain adaptation and partial-label scenarios.