 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Gradient-Based Inference for Manipulation Planning in Contact Factor Graphs
Mar 08, 2025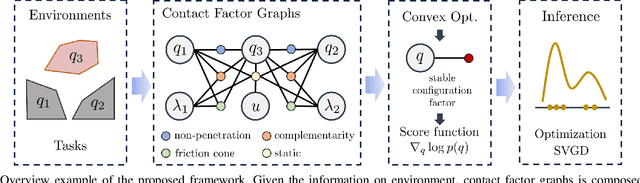



This paper presents a framework designed to tackle a range of planning problems arise in manipulation, which typically involve complex geometric-physical reasoning related to contact and dynamic constraints. We introduce the Contact Factor Graph (CFG) to graphically model these diverse factors, enabling us to perform inference on the graphs to approximate the distribution and sample appropriate solutions. We propose a novel approach that can incorporate various phenomena of contact manipulation as differentiable factors, and develop an efficient inference algorithm for CFG that leverages this differentiability along with the conditional probabilities arising from the structured nature of contact. Our results demonstrate the capability of our framework in generating viable samples and approximating posterior distributions for various manipulation scenarios.
Variations of Augmented Lagrangian for Robotic Multi-Contact Simulation
Feb 24, 2025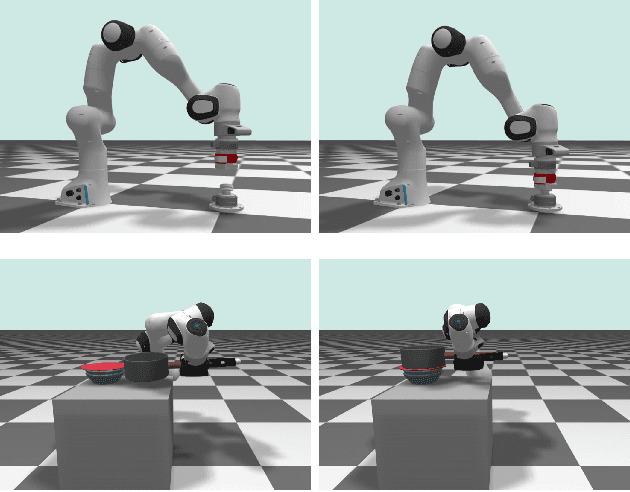


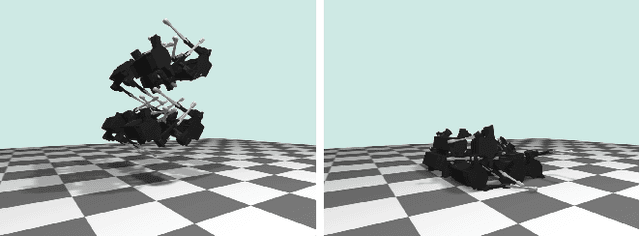
The multi-contact nonlinear complementarity problem (NCP) is a naturally arising challenge in robotic simulations. Achieving high performance in terms of both accuracy and efficiency remains a significant challenge, particularly in scenarios involving intensive contacts and stiff interactions. In this article, we introduce a new class of multi-contact NCP solvers based on the theory of the Augmented Lagrangian (AL). We detail how the standard derivation of AL in convex optimization can be adapted to handle multi-contact NCP through the iteration of surrogate problem solutions and the subsequent update of primal-dual variables. Specifically, we present two tailored variations of AL for robotic simulations: the Cascaded Newton-based Augmented Lagrangian (CANAL) and the Subsystem-based Alternating Direction Method of Multipliers (SubADMM). We demonstrate how CANAL can manage multi-contact NCP in an accurate and robust manner, while SubADMM offers superior computational speed, scalability, and parallelizability for high degrees-of-freedom multibody systems with numerous contacts. Our results showcase the effectiveness of the proposed solver framework, illustrating its advantages in various robotic manipulation scenarios.