 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Internal Stray Light Calibration of AMCW Coaxial Scanning LiDAR Using GMM and PSO
Feb 28, 2023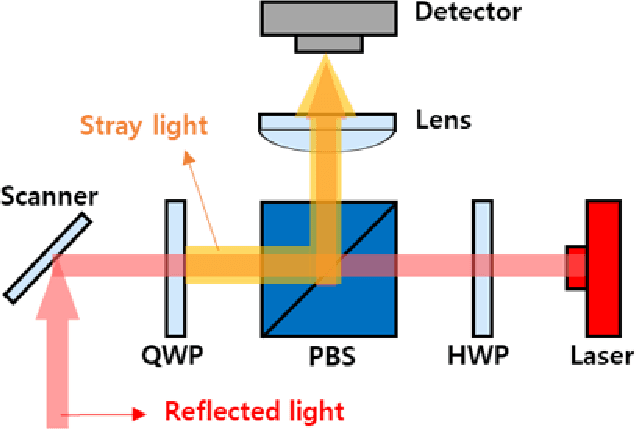
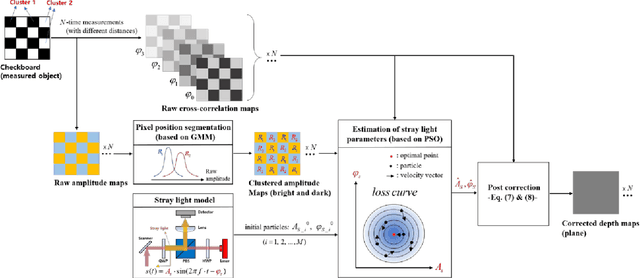
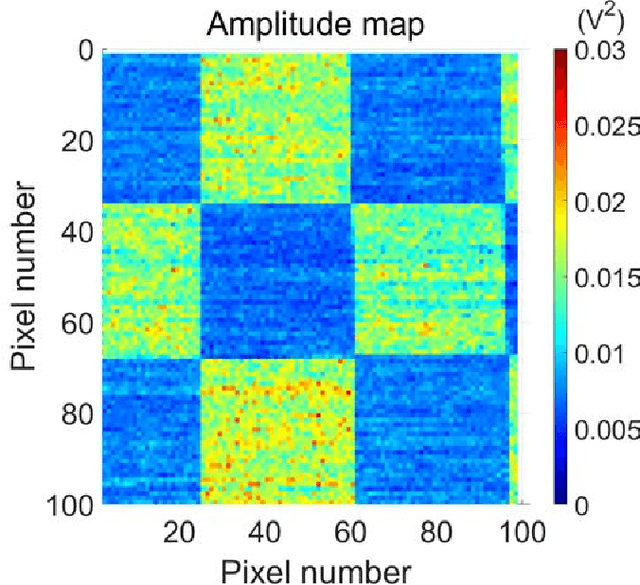
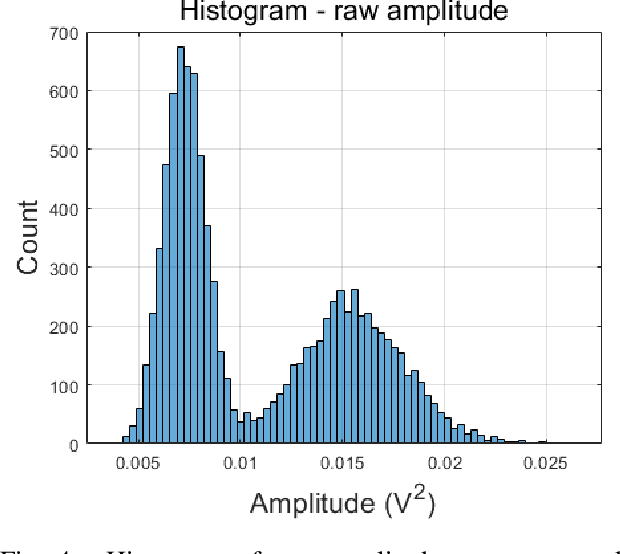
In this paper, an automatic calibration algorithm is proposed to reduce the depth error caused by internal stray light in amplitude-modulated continuous wave (AMCW) coaxial scanning light detection and ranging (LiDAR). Assuming that the internal stray light inside the proposed AMCW scanning LiDAR is static, the amplitude and phase delay of internal stray light are estimated using the Gaussian mixture model (GMM) and particle swarm optimization (PSO). Specifically, the raw amplitude (amplitude of raw cross-correlation) map of calibration checkboard at specific distance is segmented by GMM with two clusters (the bright and dark regions). The loss function is then defined as L1-norm of difference between mean depth of the amplitude-segmented clusters. This loss function is minimized by PSO to estimate the two optimal target parameters: the amplitude and phase delay of internal stray light. To avoid overfitting at a specific distance, the calibration check board is measured at multiple distances and the average of L1 loss functions from all measured distances is chosen as the actual loss. According to the validation of the proposed algorithm, the original loss is reduced from tens of centimeters to 3.2 mm when the distance of the calibration checkboard is between 1m and 4 m. This accurate depth error correction performance is also maintained in the depth and raw amplitude images of geometrically complex objects. The proposed internal stray light calibration algorithm in this paper can be used for any type of AMCW coaxial scanning LiDAR regardless of its optical characteristics.
Highly precise AMCW time-of-flight scanning sensor based on digital-parallel demodulation
Dec 16, 2021
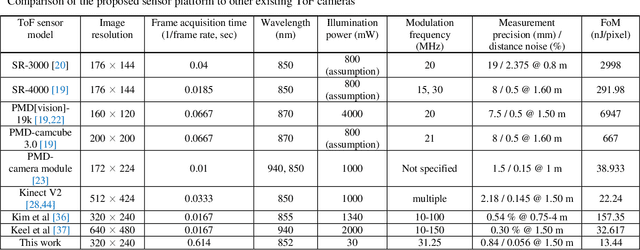

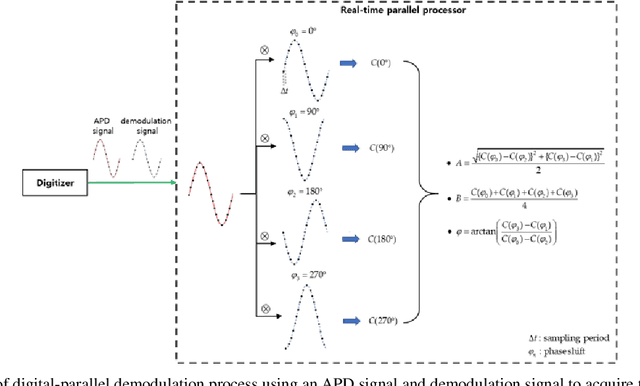
In this paper, a novel amplitude-modulated continuous wave (AMCW) time-of-flight (ToF) scanning sensor based on digital-parallel demodulation is proposed and demonstrated in the aspect of distance measurement precision. Since digital-parallel demodulation utilizes a high-amplitude demodulation signal with zero-offset, the proposed sensor platform can maintain extremely high demodulation contrast. Meanwhile, as all cross correlated samples are calculated in parallel and in extremely short integration time, the proposed sensor platform can utilize a 2D laser scanning structure with a single photo detector, maintaining a moderate frame rate. This optical structure can increase the received optical SNR and remove the crosstalk of image pixel array. Based on these measurement properties, the proposed AMCW ToF scanning sensor shows highly precise 3D depth measurement performance. In this study, this precise measurement performance is explained in detail. Additionally, the actual measurement performance of the proposed sensor platform is experimentally validated under various conditions.
Towards Real-time and Light-weight Line Segment Detection
Jun 01, 2021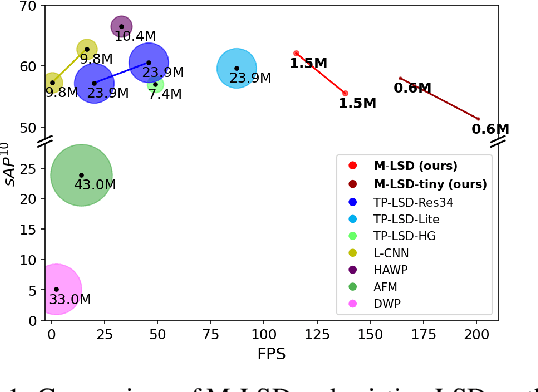
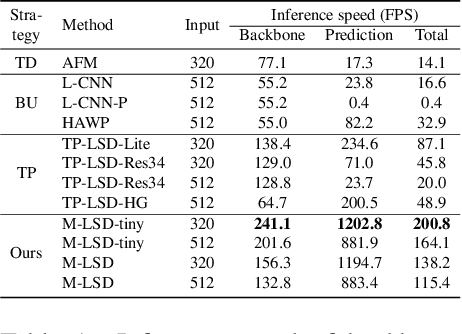
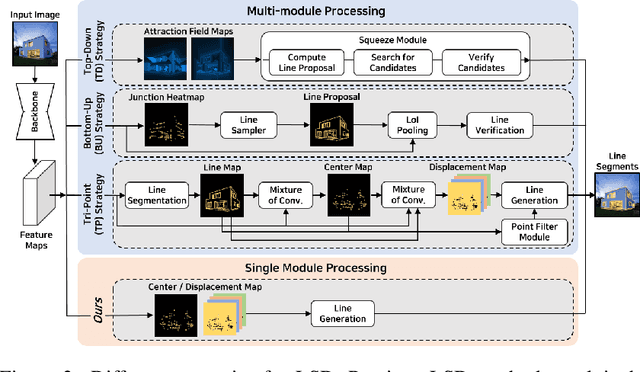
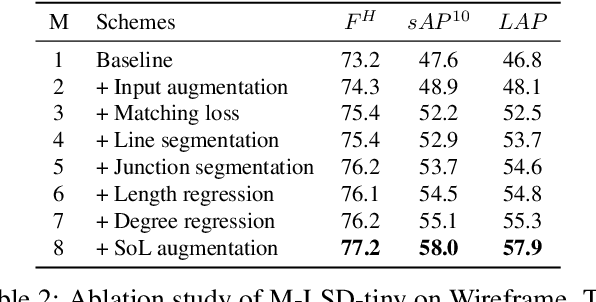
Previous deep learning-based line segment detection (LSD) suffer from the immense model size and high computational cost for line prediction. This constrains them from real-time inference on computationally restricted environments. In this paper, we propose a real-time and light-weight line segment detector for resource-constrained environments named Mobile LSD (M-LSD). We design an extremely efficient LSD architecture by minimizing the backbone network and removing the typical multi-module process for line prediction in previous methods. To maintain competitive performance with such a light-weight network, we present novel training schemes: Segments of Line segment (SoL) augmentation and geometric learning scheme. SoL augmentation splits a line segment into multiple subparts, which are used to provide auxiliary line data during the training process. Moreover, the geometric learning scheme allows a model to capture additional geometry cues from matching loss, junction and line segmentation, length and degree regression. Compared with TP-LSD-Lite, previously the best real-time LSD method, our model (M-LSD-tiny) achieves competitive performance with 2.5% of model size and an increase of 130.5% in inference speed on GPU when evaluated with Wireframe and YorkUrban datasets. Furthermore, our model runs at 56.8 FPS and 48.6 FPS on Android and iPhone mobile devices, respectively. To the best of our knowledge, this is the first real-time deep LSD method available on mobile devices.