 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEEGS: A Transparent Model of Emotions
Nov 04, 2020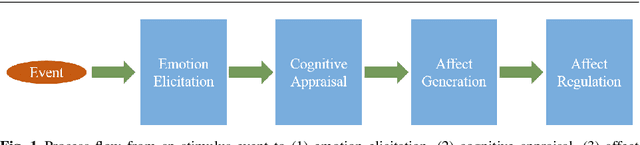

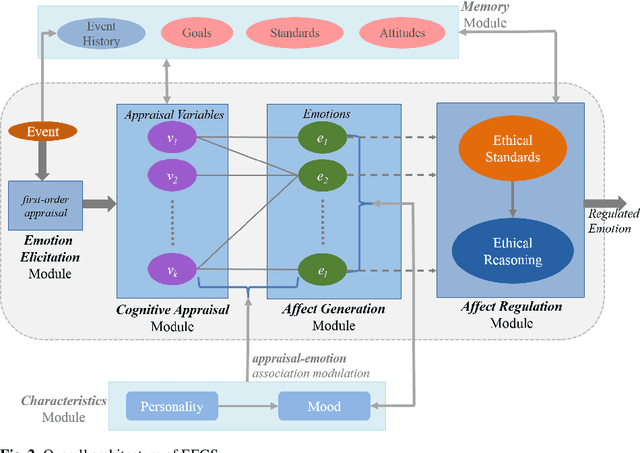

This paper presents the computational details of our emotion model, EEGS, and also provides an overview of a three-stage validation methodology used for the evaluation of our model, which can also be applicable for other computational models of emotion. A major gap in existing emotion modelling literature has been the lack of computational/technical details of the implemented models, which not only makes it difficult for early-stage researchers to understand the area but also prevents benchmarking of the developed models for expert researchers. We partly addressed these issues by presenting technical details for the computation of appraisal variables in our previous work. In this paper, we present mathematical formulas for the calculation of emotion intensities based on the theoretical premises of appraisal theory. Moreover, we will discuss how we enable our emotion model to reach to a regulated emotional state for social acceptability of autonomous agents. We hope this paper will allow a better transparency of knowledge, accurate benchmarking and further evolution of the field of emotion modelling.
Fog Robotics for Efficient, Fluent and Robust Human-Robot Interaction
Nov 14, 2018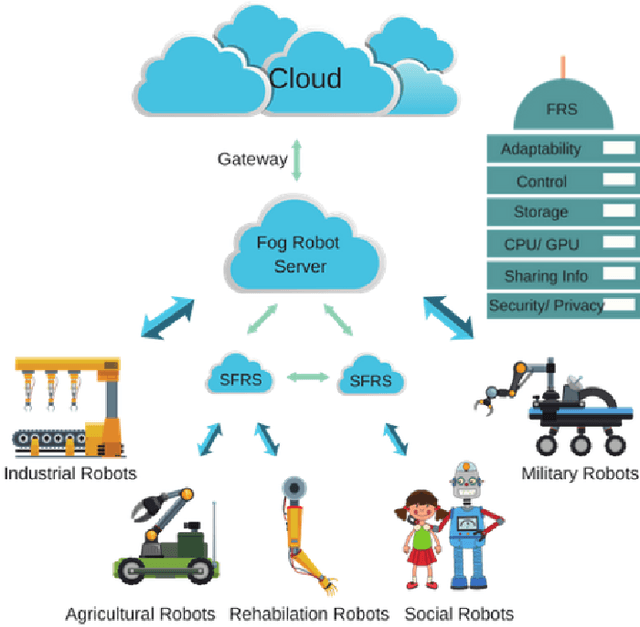
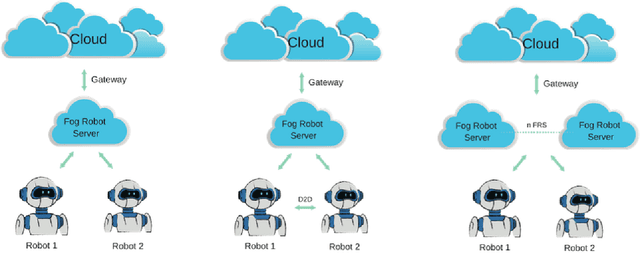
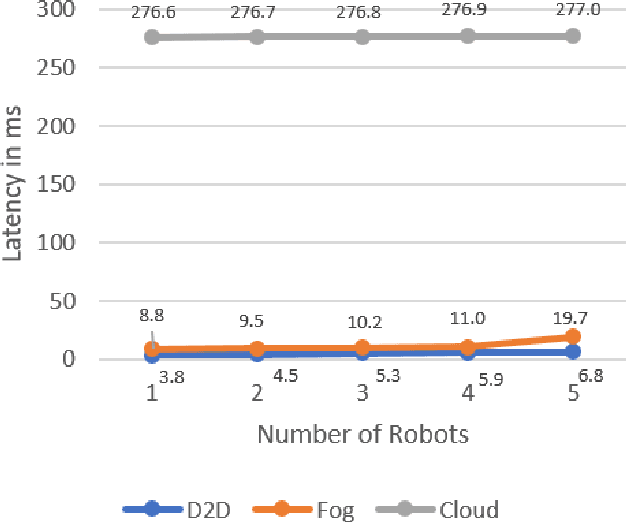

Active communication between robots and humans is essential for effective human-robot interaction. To accomplish this objective, Cloud Robotics (CR) was introduced to make robots enhance their capabilities. It enables robots to perform extensive computations in the cloud by sharing their outcomes. Outcomes include maps, images, processing power, data, activities, and other robot resources. But due to the colossal growth of data and traffic, CR suffers from serious latency issues. Therefore, it is unlikely to scale a large number of robots particularly in human-robot interaction scenarios, where responsiveness is paramount. Furthermore, other issues related to security such as privacy breaches and ransomware attacks can increase. To address these problems, in this paper, we have envisioned the next generation of social robotic architectures based on Fog Robotics (FR) that inherits the strengths of Fog Computing to augment the future social robotic systems. These new architectures can escalate the dexterity of robots by shoving the data closer to the robot. Additionally, they can ensure that human-robot interaction is more responsive by resolving the problems of CR. Moreover, experimental results are further discussed by considering a scenario of FR and latency as a primary factor comparing to CR models.