 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMin-Sum Uniform Coverage Problem by Autonomous Mobile Robots
Feb 11, 2026We study the \textit{min-sum uniform coverage} problem for a swarm of $n$ mobile robots on a given finite line segment and on a circle having finite positive radius, where the circle is given as an input. The robots must coordinate their movements to reach a uniformly spaced configuration that minimizes the total distance traveled by all robots. The robots are autonomous, anonymous, identical, and homogeneous, and operate under the \textit{Look-Compute-Move} (LCM) model with \textit{non-rigid} motion controlled by a fair asynchronous scheduler. They are oblivious and silent, possessing neither persistent memory nor a means of explicit communication. In the \textbf{line-segment setting}, the \textit{min-sum uniform coverage} problem requires placing the robots at uniformly spaced points along the segment so as to minimize the total distance traveled by all robots. In the \textbf{circle setting} for this problem, the robots have to arrange themselves uniformly around the given circle to form a regular $n$-gon. There is no fixed orientation or designated starting vertex, and the goal is to minimize the total distance traveled by all the robots. We present a deterministic distributed algorithm that achieves uniform coverage in the line-segment setting with minimum total movement cost. For the circle setting, we characterize all initial configurations for which the \textit{min-sum uniform coverage} problem is deterministically unsolvable under the considered robot model. For all the other remaining configurations, we provide a deterministic distributed algorithm that achieves uniform coverage while minimizing the total distance traveled. These results characterize the deterministic solvability of min-sum coverage for oblivious robots and achieve optimal cost whenever solvable.
A Get-Together for Deaf and Dumb Robots in Three dimensional Space
Apr 02, 2016


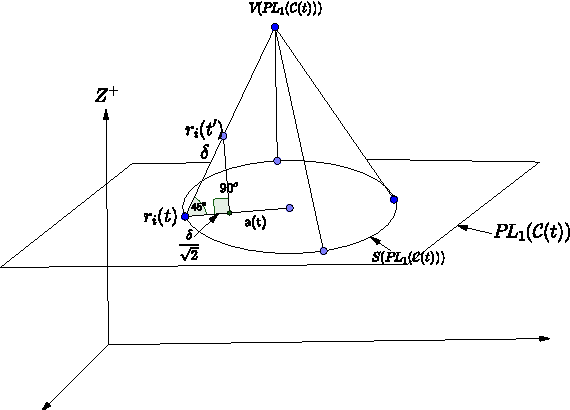
This paper proposes a strategy for a group of deaf and dumb robots, carrying clocks from different countries, to meet at a geographical location which is not fixed in advanced. The robots act independently. They can observe others, compute some locations and walk towards those locations. They can only get a snapshot of the locations of other robots but can not detect whether they are static or in motion. The robots are forgetful; once they have completed their motion they forget their previous locations and observations. Again they decide new destinations to move to. Eventually all the robots compute the same destination and meet there. There exists no global positioning system. As they stand, they agree on up and down directions. However, as they do not have any compass, the other directions are not agreed upon. They also do not agree on the clockwise direction. For determining a strategy, we imagine the robots to be points on a three dimensional plane where all the robots are mutually visible to each other always. The strategy we propose has to be obeyed by all the robots independently with respect to their own clock and compass. Initially the robots start from distinct locations. Some dead robots may be present in the system or some may die any time before or after the get together. However, the live robots are not aware of the presence of these dead robots.