 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Get-Together for Deaf and Dumb Robots in Three dimensional Space
Paper and Code
Apr 02, 2016


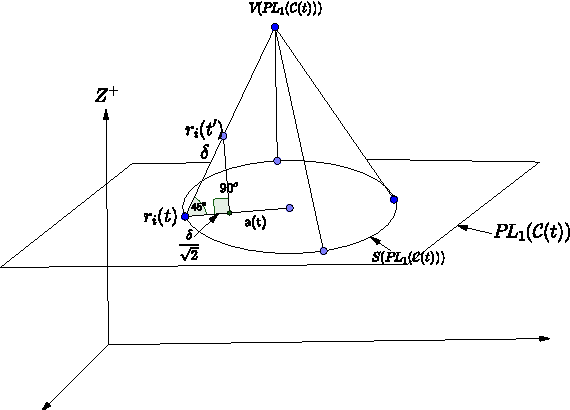
This paper proposes a strategy for a group of deaf and dumb robots, carrying clocks from different countries, to meet at a geographical location which is not fixed in advanced. The robots act independently. They can observe others, compute some locations and walk towards those locations. They can only get a snapshot of the locations of other robots but can not detect whether they are static or in motion. The robots are forgetful; once they have completed their motion they forget their previous locations and observations. Again they decide new destinations to move to. Eventually all the robots compute the same destination and meet there. There exists no global positioning system. As they stand, they agree on up and down directions. However, as they do not have any compass, the other directions are not agreed upon. They also do not agree on the clockwise direction. For determining a strategy, we imagine the robots to be points on a three dimensional plane where all the robots are mutually visible to each other always. The strategy we propose has to be obeyed by all the robots independently with respect to their own clock and compass. Initially the robots start from distinct locations. Some dead robots may be present in the system or some may die any time before or after the get together. However, the live robots are not aware of the presence of these dead robots.