 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth image hand tracking from an overhead perspective using partially labeled, unbalanced data: Development and real-world testing
Sep 06, 2014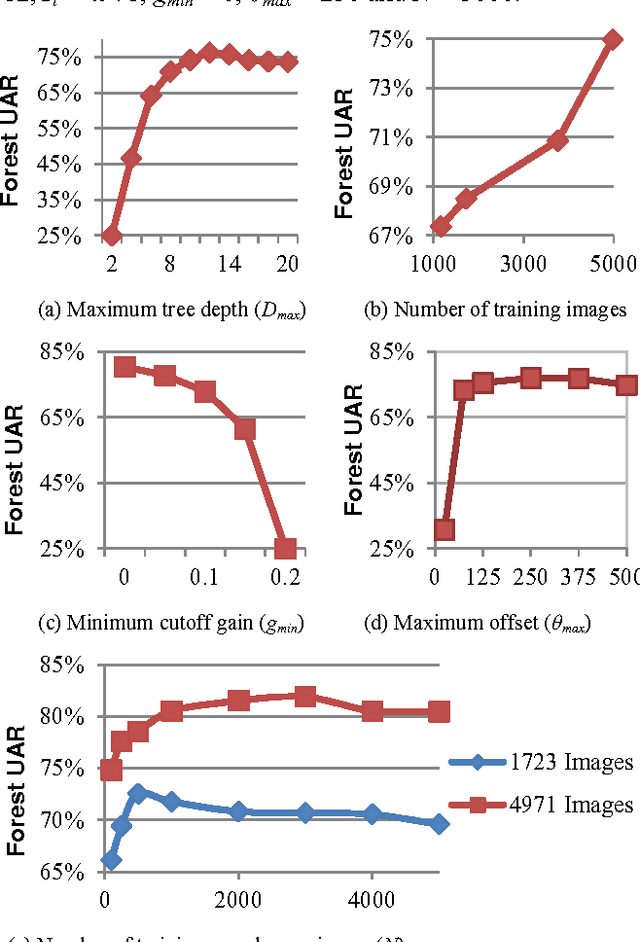
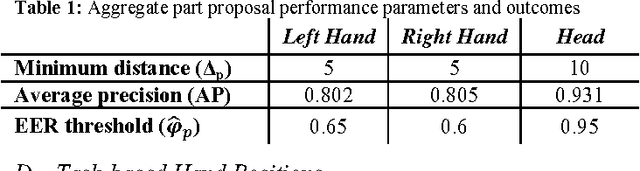

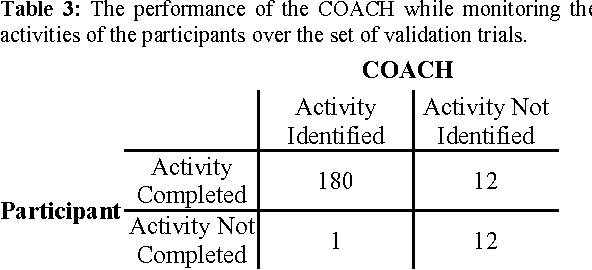
We present the development and evaluation of a hand tracking algorithm based on single depth images captured from an overhead perspective for use in the COACH prompting system. We train a random decision forest body part classifier using approximately 5,000 manually labeled, unbalanced, partially labeled training images. The classifier represents a random subset of pixels in each depth image with a learned probability density function across all trained body parts. A local mode-find approach is used to search for clusters present in the underlying feature space sampled by the classified pixels. In each frame, body part positions are chosen as the mode with the highest confidence. User hand positions are translated into hand washing task actions based on proximity to environmental objects. We validate the performance of the classifier and task action proposals on a large set of approximately 24,000 manually labeled images.
Relational Approach to Knowledge Engineering for POMDP-based Assistance Systems as a Translation of a Psychological Model
Jun 25, 2012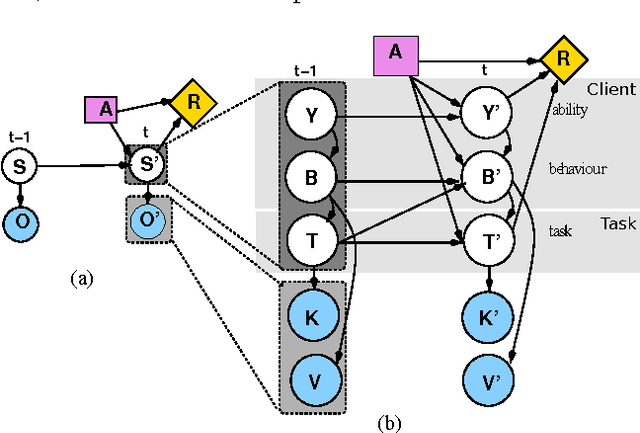
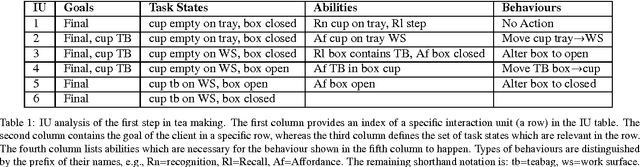
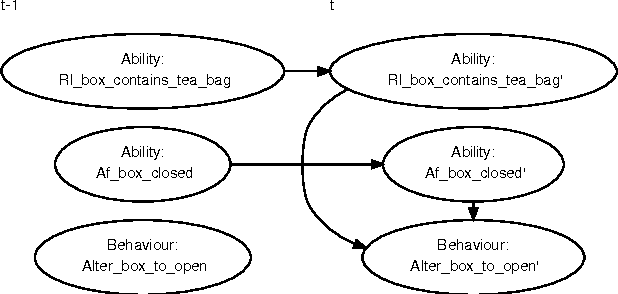
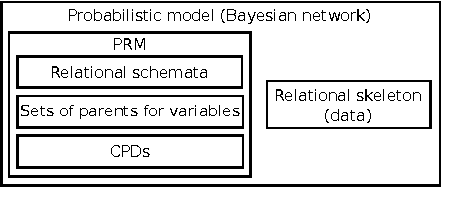
Assistive systems for persons with cognitive disabilities (e.g. dementia) are difficult to build due to the wide range of different approaches people can take to accomplishing the same task, and the significant uncertainties that arise from both the unpredictability of client's behaviours and from noise in sensor readings. Partially observable Markov decision process (POMDP) models have been used successfully as the reasoning engine behind such assistive systems for small multi-step tasks such as hand washing. POMDP models are a powerful, yet flexible framework for modelling assistance that can deal with uncertainty and utility. Unfortunately, POMDPs usually require a very labour intensive, manual procedure for their definition and construction. Our previous work has described a knowledge driven method for automatically generating POMDP activity recognition and context sensitive prompting systems for complex tasks. We call the resulting POMDP a SNAP (SyNdetic Assistance Process). The spreadsheet-like result of the analysis does not correspond to the POMDP model directly and the translation to a formal POMDP representation is required. To date, this translation had to be performed manually by a trained POMDP expert. In this paper, we formalise and automate this translation process using a probabilistic relational model (PRM) encoded in a relational database. We demonstrate the method by eliciting three assistance tasks from non-experts. We validate the resulting POMDP models using case-based simulations to show that they are reasonable for the domains. We also show a complete case study of a designer specifying one database, including an evaluation in a real-life experiment with a human actor.