 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Sampling: Algorithmic vs. Human Waypoint Selection
Apr 24, 2021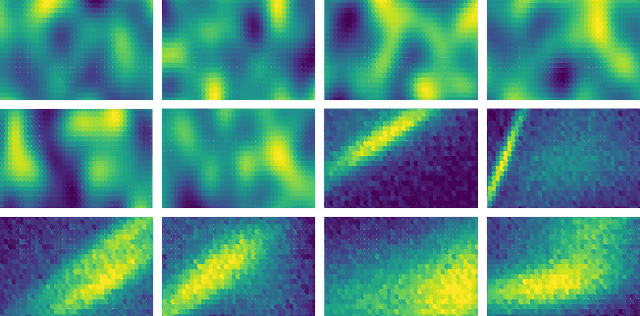
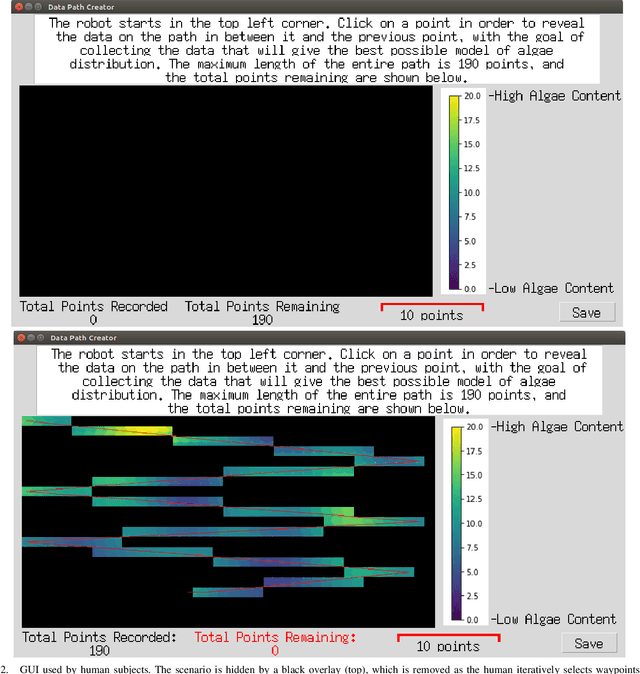
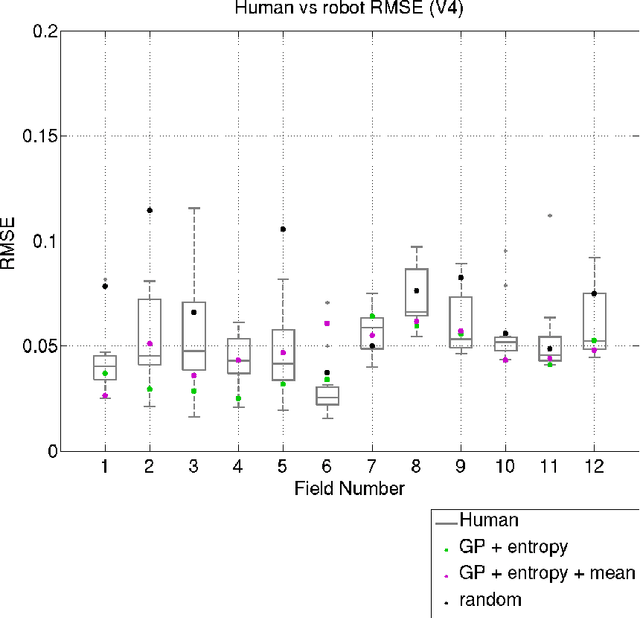
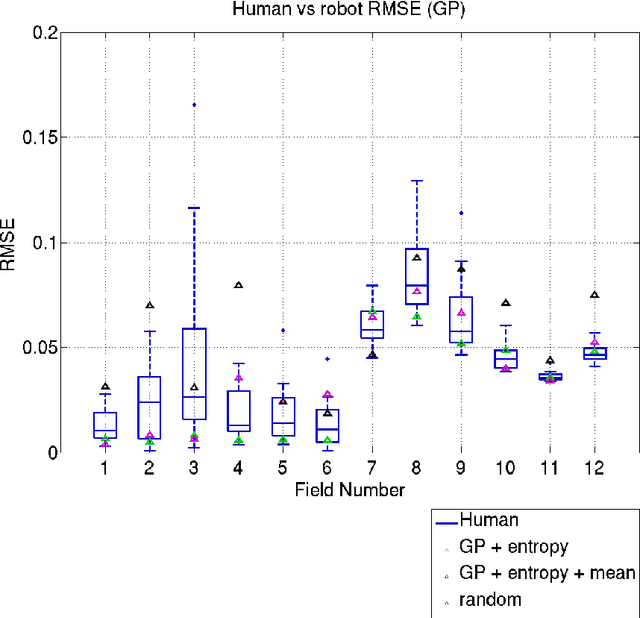
Robots are used for collecting samples from natural environments to create models of, for example, temperature or algae fields in the ocean. Adaptive informative sampling is a proven technique for this kind of spatial field modeling. This paper compares the performance of humans versus adaptive informative sampling algorithms for selecting informative waypoints. The humans and simulated robot are given the same information for selecting waypoints, and both are evaluated on the accuracy of the resulting model. We developed a graphical user interface for selecting waypoints and visualizing samples. Eleven participants iteratively picked waypoints for twelve scenarios. Our simulated robot used Gaussian Process regression with two entropy-based optimization criteria to iteratively choose waypoints. Our results show that the robot can on average perform better than the average human, and approximately as good as the best human, when the model assumptions correspond to the actual field. However, when the model assumptions do not correspond as well to the characteristics of the field, both human and robot performance are no better than random sampling.
Planning Safe Paths through Hazardous Environments
Nov 12, 2018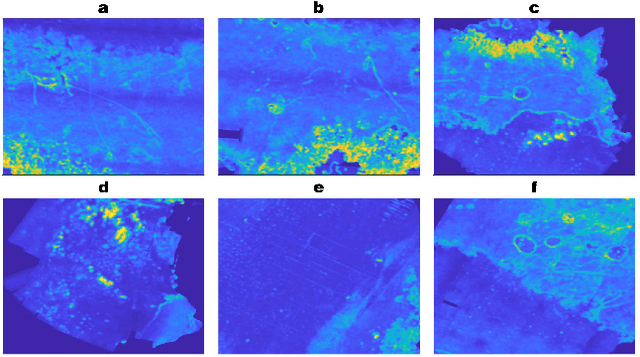
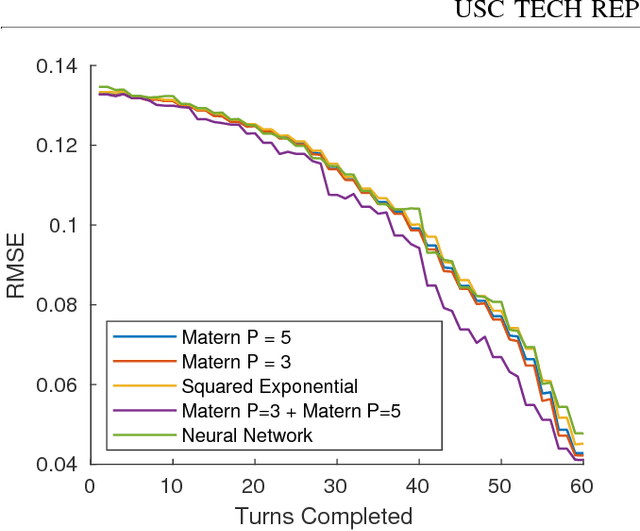
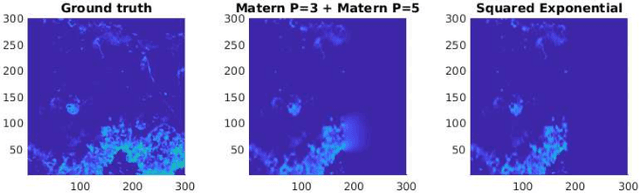
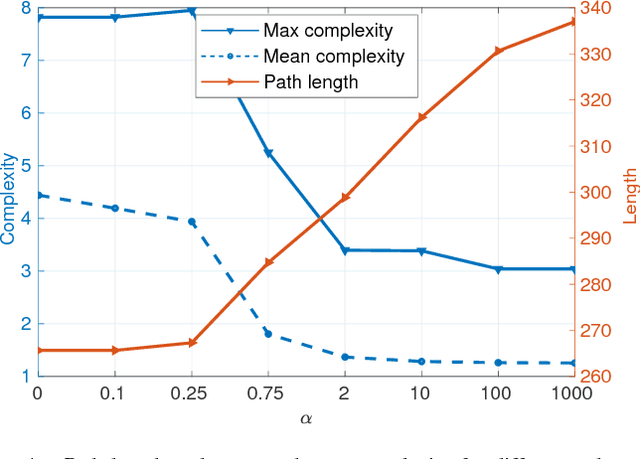
Autonomous underwater vehicles (AUVs) are robotic platforms that are commonly used to map the sea floor, for example for benthic surveys or for naval mine countermeasures (MCM) operations. AUVs create an acoustic image of the survey area, such that objects on the seabed can be identified and, in the case of MCM, mines can be found and disposed of. The common method for creating such seabed maps is to run a lawnmower survey, which is a standard method in coverage path planning. We are interested in exploring alternate techniques for surveying areas of interest, in order to reduce mission time or assess feasible actions, such as finding a safe path through a hazardous region. In this paper, we use Gaussian Process regression to build models of seabed complexity data, obtained through lawnmower surveys. We evaluate several commonly used kernels to assess their modeling performance, which includes modeling discontinuities in the data. Our results show that an additive Mat\'ern kernel is most suitable for modeling seabed complexity data. On top of the GP model, we use adaptations of two standard path planning methods, A* and RRT*, to find safe paths for marine vessels through the modeled areas. We evaluate the planned paths and also run a vehicle dynamics simulator to assess potential performance by a marine vessel.