 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Sampling: Algorithmic vs. Human Waypoint Selection
Paper and Code
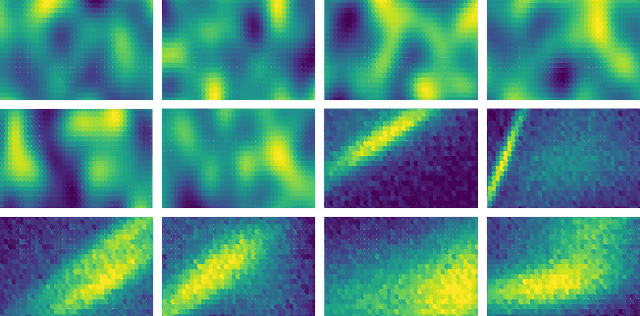
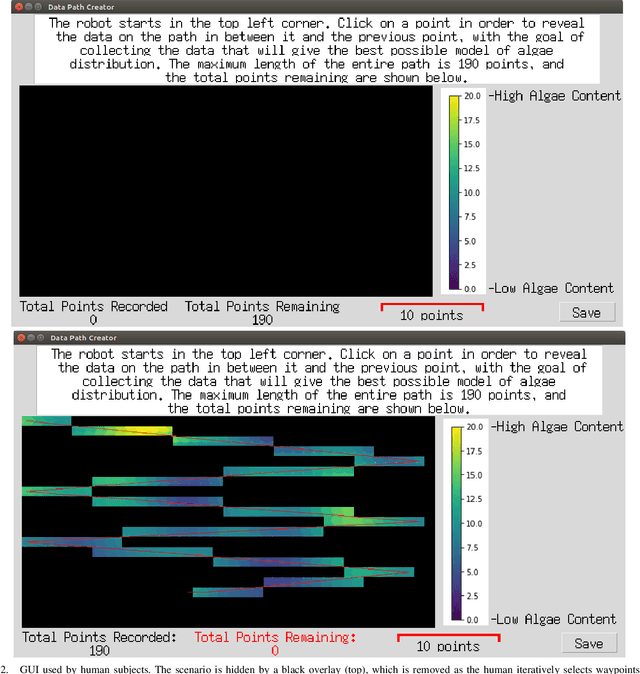
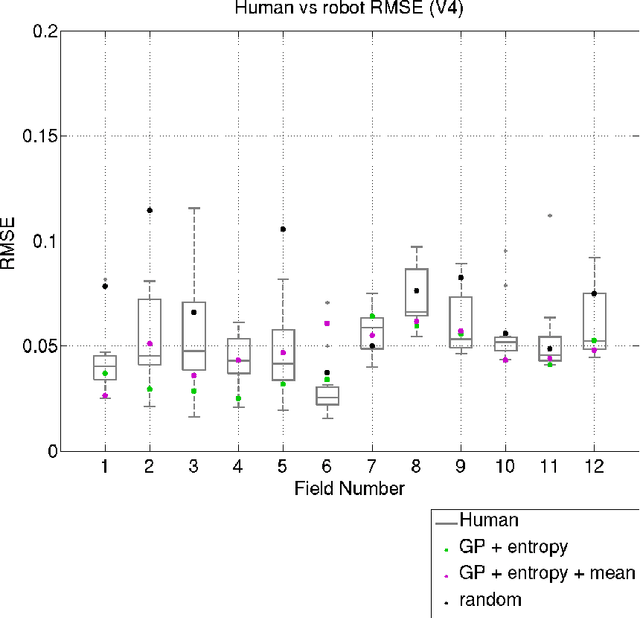
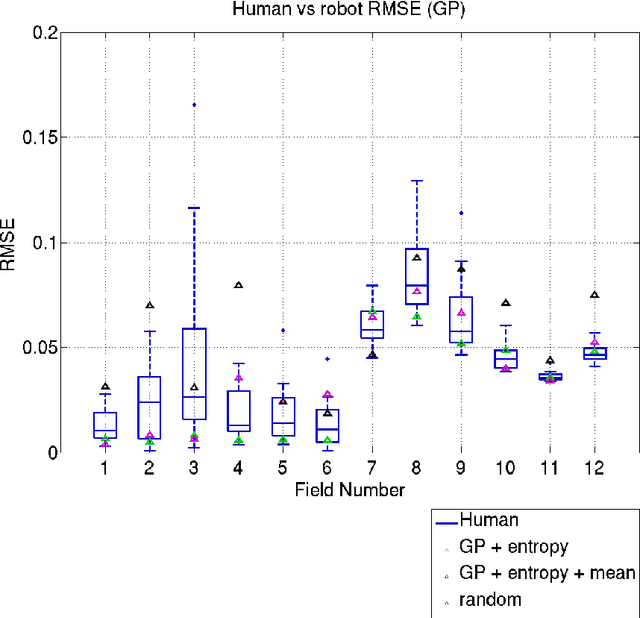
Robots are used for collecting samples from natural environments to create models of, for example, temperature or algae fields in the ocean. Adaptive informative sampling is a proven technique for this kind of spatial field modeling. This paper compares the performance of humans versus adaptive informative sampling algorithms for selecting informative waypoints. The humans and simulated robot are given the same information for selecting waypoints, and both are evaluated on the accuracy of the resulting model. We developed a graphical user interface for selecting waypoints and visualizing samples. Eleven participants iteratively picked waypoints for twelve scenarios. Our simulated robot used Gaussian Process regression with two entropy-based optimization criteria to iteratively choose waypoints. Our results show that the robot can on average perform better than the average human, and approximately as good as the best human, when the model assumptions correspond to the actual field. However, when the model assumptions do not correspond as well to the characteristics of the field, both human and robot performance are no better than random sampling.