 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Informed Topological Signal Processing for Water Distribution Network Monitoring
May 12, 2025Water management is one of the most critical aspects of our society, together with population increase and climate change. Water scarcity requires a better characterization and monitoring of Water Distribution Networks (WDNs). This paper presents a novel framework for monitoring Water Distribution Networks (WDNs) by integrating physics-informed modeling of the nonlinear interactions between pressure and flow data with Topological Signal Processing (TSP) techniques. We represent pressure and flow data as signals defined over a second-order cell complex, enabling accurate estimation of water pressures and flows throughout the entire network from sparse sensor measurements. By formalizing hydraulic conservation laws through the TSP framework, we provide a comprehensive representation of nodal pressures and edge flows that incorporate higher-order interactions captured through the formalism of cell complexes. This provides a principled way to decompose the water flows in WDNs in three orthogonal signal components (irrotational, solenoidal and harmonic). The spectral representations of these components inherently reflect the conservation laws governing the water pressures and flows. Sparse representation in the spectral domain enable topology-based sampling and reconstruction of nodal pressures and water flows from sparse measurements. Our results demonstrate that employing cell complex-based signal representations enhances the accuracy of edge signal reconstruction, due to proper modeling of both conservative and non-conservative flows along the polygonal cells.
A Reinforcement Learning Environment for Multi-Service UAV-enabled Wireless Systems
May 11, 2021
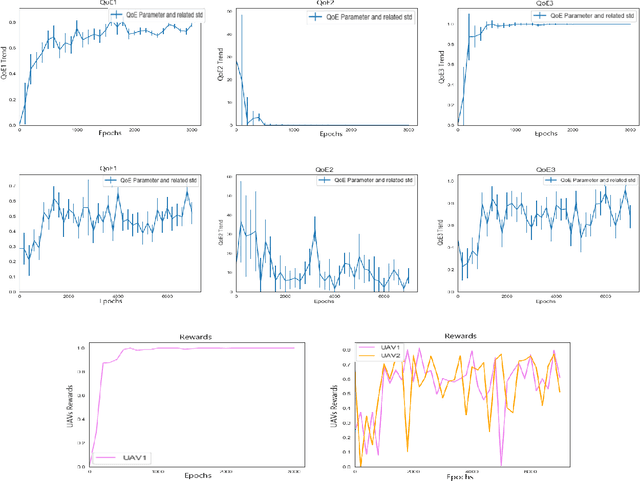

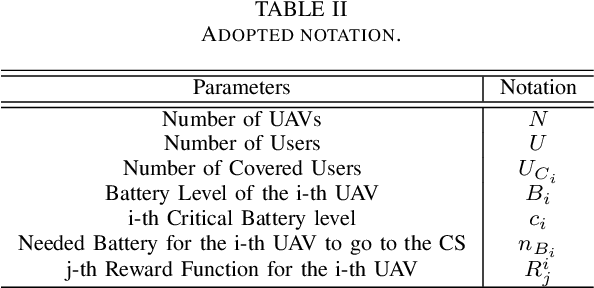
We design a multi-purpose environment for autonomous UAVs offering different communication services in a variety of application contexts (e.g., wireless mobile connectivity services, edge computing, data gathering). We develop the environment, based on OpenAI Gym framework, in order to simulate different characteristics of real operational environments and we adopt the Reinforcement Learning to generate policies that maximize some desired performance.The quality of the resulting policies are compared with a simple baseline to evaluate the system and derive guidelines to adopt this technique in different use cases. The main contribution of this paper is a flexible and extensible OpenAI Gym environment, which allows to generate, evaluate, and compare policies for autonomous multi-drone systems in multi-service applications. This environment allows for comparative evaluation and benchmarking of different approaches in a variety of application contexts.
Multiscale Anisotropic Harmonic Filters on non Euclidean domains
Feb 01, 2021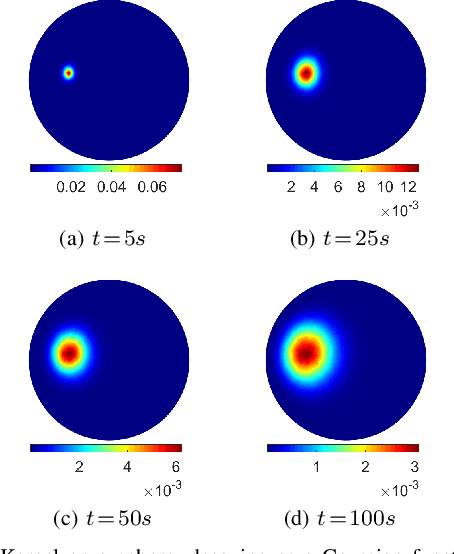

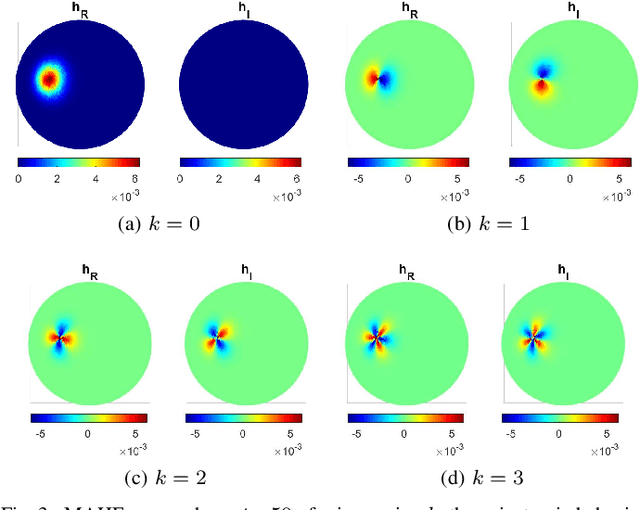

This paper introduces Multiscale Anisotropic Harmonic Filters (MAHFs) aimed at extracting signal variations over non-Euclidean domains, namely 2D-Manifolds and their discrete representations, such as meshes and 3D Point Clouds as well as graphs. The topic of pattern analysis is central in image processing and, considered the growing interest in new domains for information representation, the extension of analogous practices on volumetric data is highly demanded. To accomplish this purpose, we define MAHFs as the product of two components, respectively related to a suitable smoothing function, namely the heat kernel derived from the heat diffusion equations, and to local directional information. We analyse the effectiveness of our approach in multi-scale filtering and variation extraction. Finally, we present an application to the surface normal field and to a luminance signal textured to a mesh, aiming to spot, in a separate fashion, relevant curvature changes (support variations) and signal variations.
Improving J-divergence of brain connectivity states by graph Laplacian denoising
Dec 22, 2020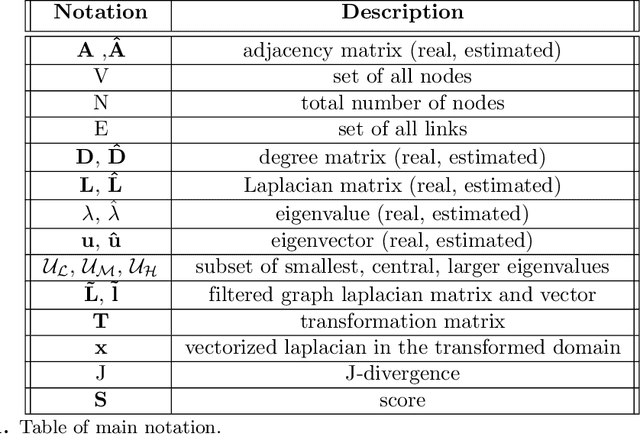
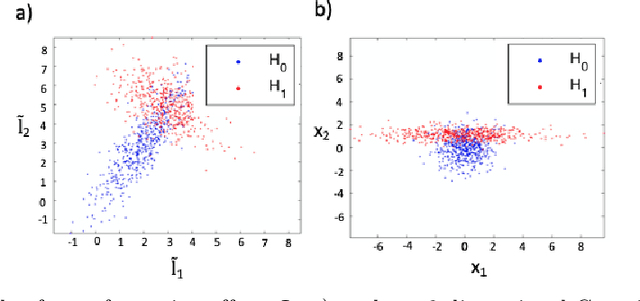
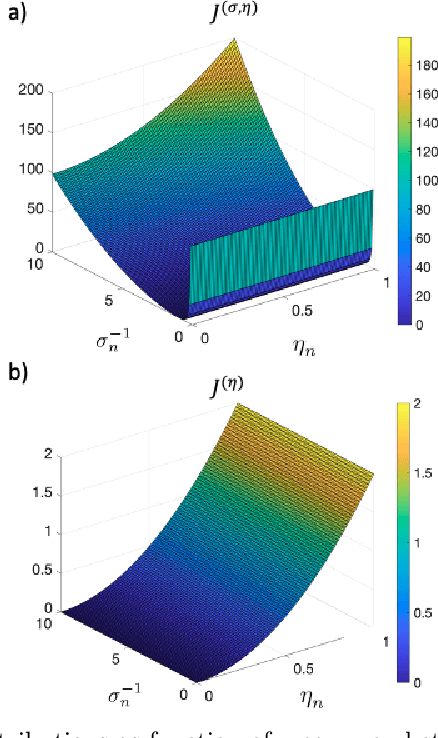
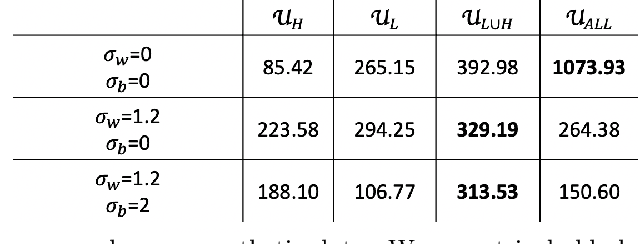
Functional connectivity (FC) can be represented as a network, and is frequently used to better understand the neural underpinnings of complex tasks such as motor imagery (MI) detection in brain-computer interfaces (BCIs). However, errors in the estimation of connectivity can affect the detection performances. In this work, we address the problem of denoising common connectivity estimates to improve the detectability of different connectivity states. Specifically, we propose a denoising algorithm that acts on the network graph Laplacian, which leverages recent graph signal processing results. Further, we derive a novel formulation of the Jensen divergence for the denoised Laplacian under different states. Numerical simulations on synthetic data show that the denoising method improves the Jensen divergence of connectivity patterns corresponding to different task conditions. Furthermore, we apply the Laplacian denoising technique to brain networks estimated from real EEG data recorded during MI-BCI experiments. Using our novel formulation of the J-divergence, we are able to quantify the distance between the FC networks in the motor imagery and resting states, as well as to understand the contribution of each Laplacian variable to the total J-divergence between two states. Experimental results on real MI-BCI EEG data demonstrate that the Laplacian denoising improves the separation of motor imagery and resting mental states, and shortens the time interval required for connectivity estimation. We conclude that the approach shows promise for the robust detection of connectivity states while being appealing for implementation in real-time BCI applications.