 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentification of Unmodeled Objects from Symbolic Descriptions
Jan 23, 2017

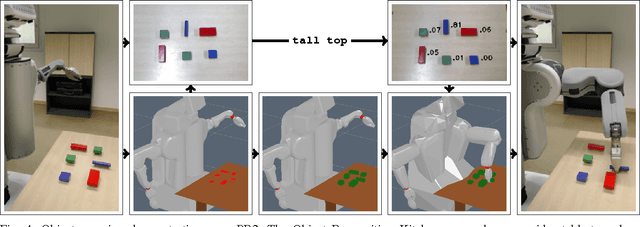
Successful human-robot cooperation hinges on each agent's ability to process and exchange information about the shared environment and the task at hand. Human communication is primarily based on symbolic abstractions of object properties, rather than precise quantitative measures. A comprehensive robotic framework thus requires an integrated communication module which is able to establish a link and convert between perceptual and abstract information. The ability to interpret composite symbolic descriptions enables an autonomous agent to a) operate in unstructured and cluttered environments, in tasks which involve unmodeled or never seen before objects; and b) exploit the aggregation of multiple symbolic properties as an instance of ensemble learning, to improve identification performance even when the individual predicates encode generic information or are imprecisely grounded. We propose a discriminative probabilistic model which interprets symbolic descriptions to identify the referent object contextually w.r.t.\ the structure of the environment and other objects. The model is trained using a collected dataset of identifications, and its performance is evaluated by quantitative measures and a live demo developed on the PR2 robot platform, which integrates elements of perception, object extraction, object identification and grasping.