 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuper-Resolution Estimation of UWB Channels including the Diffuse Component -- An SBL-Inspired Approach
Aug 11, 2023In this paper, we present an iterative algorithm that detects and estimates the specular components and estimates the diffuse component of single-input-multiple-output (SIMO) ultra-wide-band (UWB) multipath channels. Specifically, the algorithm super-resolves the specular components in the delay-angle-of-arrival domain and estimates the parameters of a parametric model of the delay-angle power spectrum characterizing the diffuse component. Channel noise is also estimated. In essence, the algorithm solves the problem of estimating spectral lines (the specular components) in colored noise (generated by the diffuse component and channel noise). Its design is inspired by the sparse Bayesian learning (SBL) framework. As a result the iteration process contains a threshold condition that determines whether a candidate specular component shall be retained or pruned. By relying to results from extreme-value analysis the threshold of this condition is suitably adapted to ensure a prescribed probability of detecting spurious specular components. Studies using synthetic and real channel measurement data demonstrate the virtues of the algorithm: it is able to still detect and accurately estimate specular components, even when their separation in delay and angle is down to half the Rayleigh resolution limit (RRL) of the equipment; it is robust in the sense that it tends to return no more specular components than the actual ones. Finally, the algorithm is shown to outperform a state-of-the-art super-resolution channel estimator.
Multipath-based SLAM using Belief Propagation with Interacting Multiple Dynamic Models
Mar 23, 2021

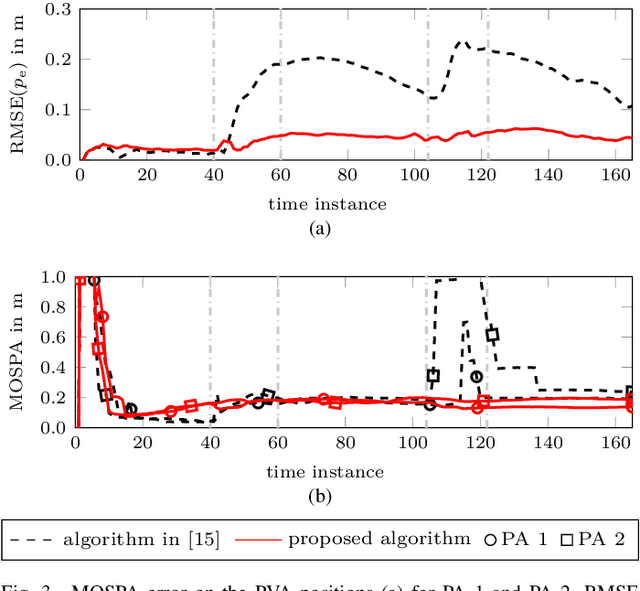

In this paper, we present a Bayesian multipath-based simultaneous localization and mapping (SLAM) algorithm that continuously adapts interacting multiple models (IMM) parameters to describe the mobile agent state dynamics. The time-evolution of the IMM parameters is described by a Markov chain and the parameters are incorporated into the factor graph structure that represents the statistical structure of the SLAM problem. The proposed belief propagation (BP)-based algorithm adapts, in an online manner, to time-varying system models by jointly inferring the model parameters along with the agent and map feature states. The performance of the proposed algorithm is finally evaluating with a simulated scenario. Our numerical simulation results show that the proposed multipath-based SLAM algorithm is able to cope with strongly changing agent state dynamics.