 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuality of Service Based Radar Resource Management for Navigation and Positioning
Jun 12, 2023



In hostile environments, GNSS is a potentially unreliable solution for self-localization and navigation. Many systems only use an IMU as a backup system, resulting in integration errors which can dramatically increase during mission execution. We suggest using a fighter radar to illuminate satellites with known trajectories to enhance the self-localization information. This technique is time-consuming and resource-demanding but necessary as other tasks depend on the self-localization accuracy. Therefore an adaption of classical resource management frameworks is required. We propose a quality of service based resource manager with capabilities to account for inter-task dependencies to optimize the self-localization update strategy. Our results show that this leads to adaptive navigation update strategies, mastering the trade-off between self-localization and the requirements of other tasks.
* 8 pages, 9 figures
Quality of service based radar resource management for synchronisation problems
Mar 03, 2023



An intelligent radar resource management is an essential building block of any modern radar system. The quality of service based resource allocation model (Q-RAM) provides a framework for profound and quantifiable decision-making but lacks a representation of inter-task dependencies that can e.g. arise for tracking and synchronisation tasks. As a consequence, synchronisation is usually performed in fixed non-optimal patterns. We present an extension of Q-RAM which enables the resource allocation to consider complex inter-task dependencies and can produce adaptive and intelligent synchronisation schemes. The provided experimental results demonstrate a significant improvement over traditional strategies.
* 4 pages, 6 figures
Quality of service based radar resource management for interference mitigation
Mar 11, 2022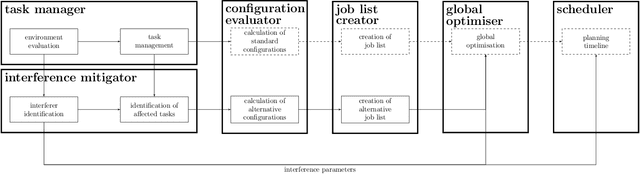



An intelligent radar resource management is an essential building block of any modern radar system. The quality of service based resource allocation model (Q-RAM) provides a framework for profound and quantifiable decision making but lacks the flexibility necessary for optimal mitigation strategies in the presence of interference. We define an extension of the Q-RAM based radar resource management framework with an intelligent interference handling capability using various mitigation methods. The approach incorporates virtual time resources and alternative task configurations to compute near-optimal solutions in the presence of interference. The provided experimental results demonstrate a significant improvement over traditional strategies.
* 4 pages, 5 figures
Quality of service based radar resource management using deep reinforcement learning
Oct 20, 2020


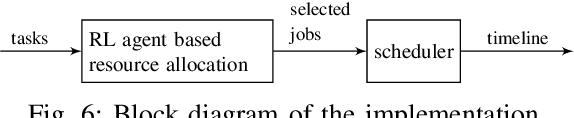
An intelligent radar resource management is an essential milestone in the development of a cognitive radar system. The quality of service based resource allocation model (Q-RAM) is a framework allowing for intelligent decision making but classical solutions seem insufficient for real-time application in a modern radar system. In this paper, we present a solution for the Q-RAM radar resource management problem using deep reinforcement learning considerably improving on runtime performance.
Robotic Control for Cognitive UWB Radar
Oct 11, 2017

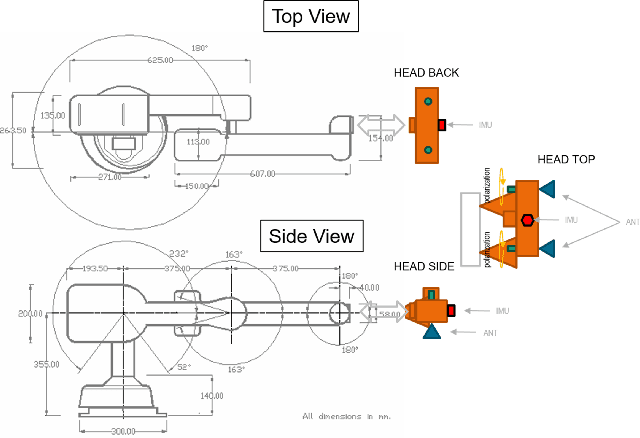
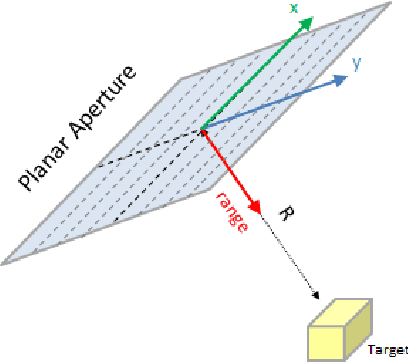
In the article, we describe a trajectory planning problem for a 6-DOF robotic manipulator arm that carries an ultra-wideband (UWB) radar sensor with synthetic aperture (SAR). The resolution depends on the trajectory and velocity profile of the sensor head. The constraints can be modelled as an optimization problem to obtain a feasible, collision-free target trajectory of the end-effector of the manipulator arm in Cartesian coordinates that minimizes observation time. For 3D-reconstruction, the target is observed in multiple height slices. For Through-the-Wall radar the sensor can be operated in sliding mode for scanning larger areas. For IED inspection the spot-light mode is preferred, constantly pointing the antennas towards the target to obtain maximum azimuth resolution.